��Ȼ���������ָ�����x�|�Ǻͼ�����ë��ͨ���������`�����|�X����ϵ�y���܉���ٜʴ_�ظ�֪�܇��h�������֮�£������������ͨ��ȱ�����ⲿ�̼��ĸ�Ч�ӑB�������c�����ָ�ĸ�֪�������(2kPa��1 MPa)����������һ���������IJ������ָ���õ��|�X���F�w������Ƥ����ģ���͙Cе���������ݶȷֲ��������m��������(��Merkel�A�P)λ����ģ������ܛ��Ƥ픲������p�|���^�����С������m�������w(��PacinianС�w)λ����ģ������Ƥ��̎�����߉��̼�푑����@���@Щ�ݶ��Y��������ʹ�˵���ָ����`���Ⱥ��^�����|�X������
�K�ݴ�W���h���ڈF�����ǰ���ߵ͜��x�����z���о����A֮��(Sci. Adv. 2019, 5, eaax0648��Mater. Horizons2020, 7, 919�C927��Angew. Chem., Int. Ed.2021, 202100984)���Y�������ָ�Cеģ���ݶ�׃�������ԣ������һ�N늈��T���Ƃ��ݶ��x�����z�IJ��������xͨ�^���늈����T��������ϩ����x�ӽ������ꖃɘO�g�Ĺ�̻���֬���γ�����ݶȲ����S�����ù⽻���܄��ÓQ�������Ƶ��ݶ��x�����z���������x�����z���ݶ����ԣ��������Ƃ�������x�ӂ��������������c����������(������Խ����)���`���ȡ����з�������ԓ�����x�ӂ������cܛ�w�C�����|�ؽY�ϣ����p��(300 Pa��2.5 Mpa)�����(-108 �浽300 ��)���w�����Ѓ�����ץȡ�ͷ������������F���ڏ��sΣ�U�h���еđ���ǰ�������P�����ԡ�Electric�\Field�\Induced Gradient Ionogels for Highly Sensitive, Broad�\Range�\Response, and Freeze/Heat�\Resistant Ionic Fingers�����}�l���ڡ�Advanced Materials���ϡ�
���ݶ��x�����z���Ƃ䡿
�����w�������l���ͼ����Ĵ�����ϩ��������谷��[VIm] [DCA]��������x�ӽ������Ļ�����ܽ��������У���ע��ɂ���늘O��ITO������֮�g���S��ʩ�����늈�����늈��T�������£���x�ӽ����w����ؓ�O�w�ƣ�������Һ���γɝ���ݶȲ���Ȼ�����Ҝ���ʹ�������̻��ԫ@���ݶ��ЙC���z�����ٌ��Ƃ���ݶ��ЙC���z�M���܄����Q�������Ƃ��ݶ��x�����z��
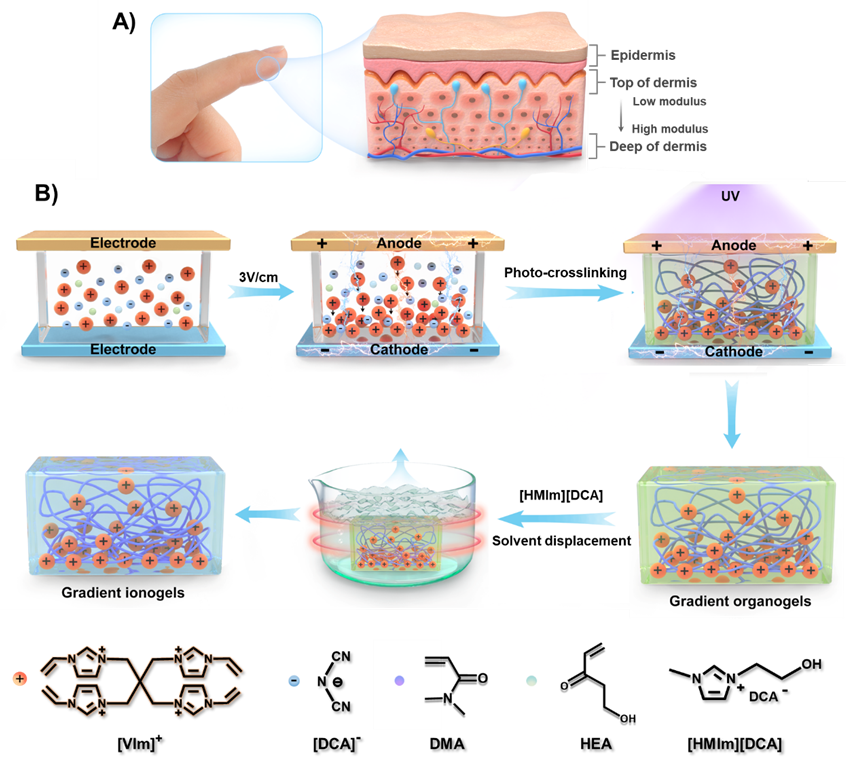
����IL���ݶ��x�����z�ęC�����Ƃ䷽��
����x�ӽ����ݶȷֲ��ı�����
ͨ�^���������ݶ��x�����z��SEM�D�M���棩�����Ԝy����ݶ��x�����z��ƽ�����ֲ�������ꎘO�ȣ���0.8��m����ꖘO�ȣ���18.7��m�������ݶ�������늈��Б��¾ۺ���W�j����x�ӽ�����ȵIJ�����µģ��^�ߵ���x�ӝ�Ȍ����^�ߵĽ��ܶȺ��^С�Ŀ��������Ħ��λ�Ͱ붨��X�侀��������V��XPS��Ҳͬ���C����x�ӽ����ķֲ���
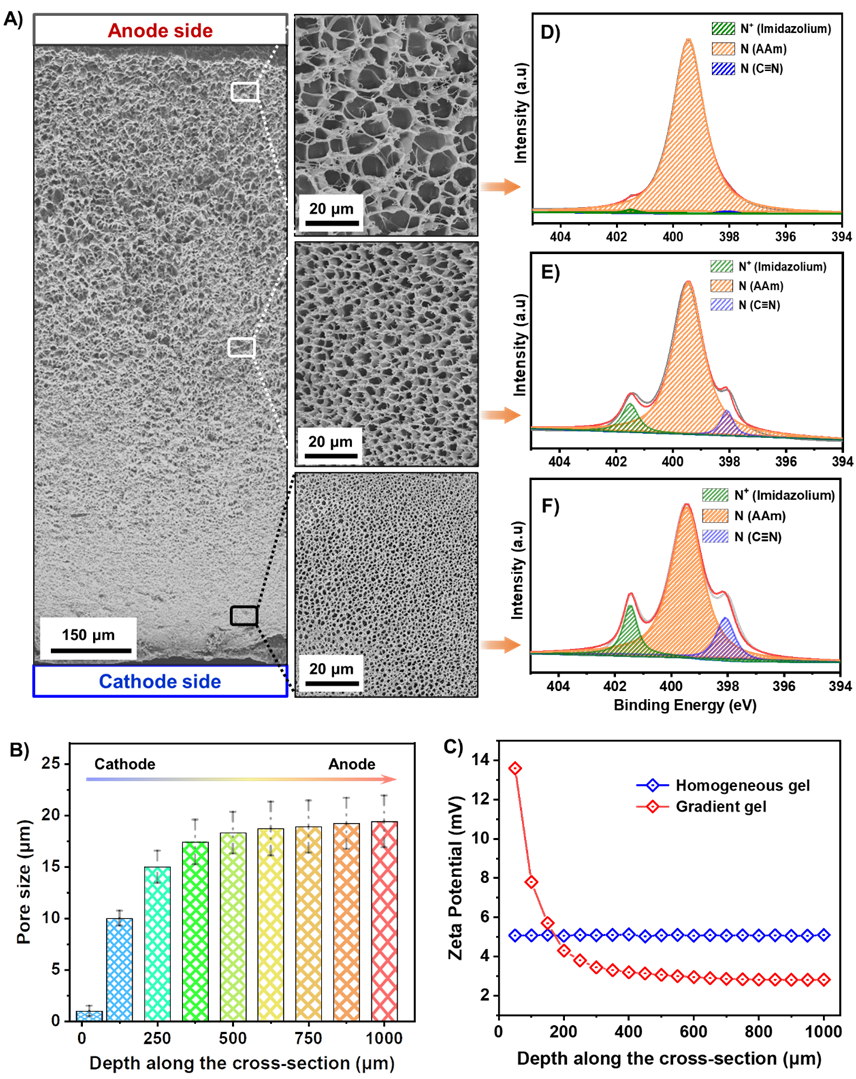
��x�ӽ������ݶȷֲ�
���x�����z���ݶșCеģ���ֲ���
�о��ˆTͨ�^����OӋ����Փģ�M��Y��ϵ�y���о����ݶ��x�����z�ė���ģ���ֲ����ݶ����z�;������z�ĉ��s����-��׃�����ڼ��d�^���б��F����ȫ��ͬ���О顣�ݶ��x�����z��������ꖘO���^ܛ����ꎘO���^Ӳ���ڵ͉��^����F���^����׃����10 kPa��׃�ε�14.8���������ڸ߉��^�����L���෴�����|�x�����z�ڎ��O�y�����͉��^����׃����10 kPa��׃��С��0.5������ͨ�^���������Ƭ�g���ݶ��x�����z�гɱ�Ƭ�����������{���@�R�y����Ƭ�ė���ģ�����y��ꎘO�ȵĸ߽��ܶȗ���ģ������10MPa�������^�ͽ��ܶȵ�ꖘO��ģ��С��10 kPa�������Ă��������IJ�������@����ģ���ݶ��⣬�x���z߀���г�ɫ�Ļ؏��ԡ����˽����ݶ��c����Y���ڸ��N�����µIJ����������Ԫ������FEM��ģ�M�l�F�����^�͉�����1 kPa�����^�쵽ܛꖘOһ�ȵ��ݶ��x�����z��λ�ƣ������|�x�����z���]��׃�����������_��100 kPa�r���߾����Fһ����λ�ơ����^�ߵĉ���������1 MPa���£��ݶ��x�����z�Կɉ��s������������ڸ߉��O�y��
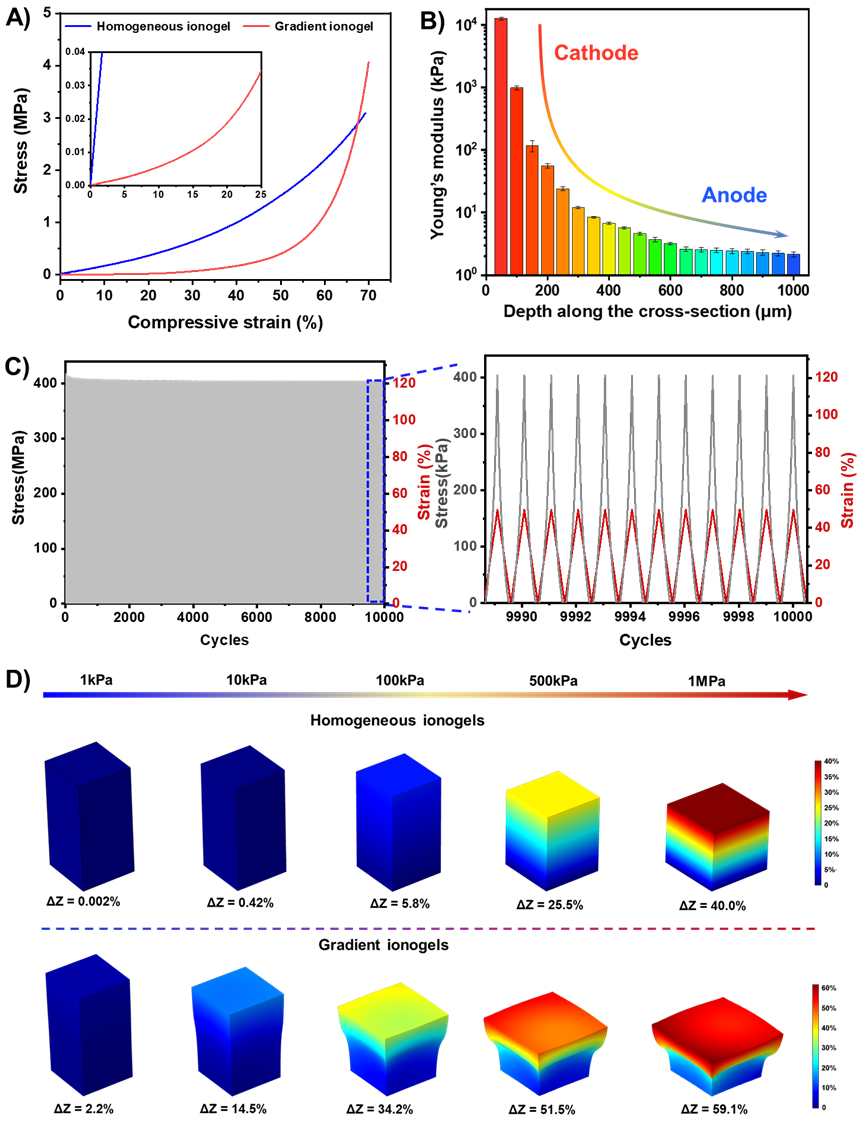
�ݶ��x�����z�ęCе����
���x�����z�ĸߵ͜��ͺ��ԡ�
���]�����������������H���ڜغ͵ėl�����\�У�����߀��������s�͘O�˵ĭh��������ߜغ͵͜أ�������͟�/�������܌����@Щ�ݶ��x�����z���P��Ҫ�����ط����Y���������ݶ��x�����z��N2�Ϳ՚�h���еķֽ�ضȾ����_300��C����������250��C��N2�Ϳ՚��оS���L�ڟ᷀�������᷀�����⣬߀ʹ�ÄӑB�������ᷨ��?120��30��C�Ĝضȷ������u�����ݶ��x�����z�Ŀ������ܣ��䲣�����D׃�c����-108�档ͨ�^�˴źͼt���֪���䃞�����ߵ͜����ܣ��������x��Һ�w�;ۺ���W�j֮�g�Ě��I����á�

�ݶ��x�����z���ߵؙ͜C��������
�������ݶ��x�����z�������x�ӂ�������
���@헹����У��ݶ��x�����z�����ژ��������νY���������x����ӂ��������ݶ��x�����z�������x��늽��|���A�ڃɂ�������a-�����������Ҷ�������ITO-PEN��Ĥ֮�g�����������늘O�����@�N�x��-��ӽ��|���γ��˽����p늌ӣ�EDL�����ԱO�y����׃�������⣬���x�����z��ꎘO�������˃�ƬITO-PEN���Ԝyԇ����衣ͨ�^�u�������Եļ��d��ж�d�A�Σ��y�Â�������푑��r�g���ɳڕr�g�քe��8 ms��6 ms��ԓ푑��r�g���������ָ��푑����ʣ�15ms���������Ƃ��8x8�ļ����|���壬�Ɍ��F����ë�������ɵĉ�����ֵ�Č��r�O�y�D��

�����ݶ��x�����z����������������u��
�������x�ӂ���������-�����У�ʡ�
����Vogel�CTamman�CFulcher���̣����ؿ�ʹ�x���w�����ʵļӿ죬�����������͜ضȾ����С����˽�Q�@�����}�����x�����zꎘO��ʹ���˃ɉKITO-PEN��yԇ��衣�����ݶ��x�����z������Y�����x�����z��ꖘO���ډ������������@��׃����ꎘO�Ȅt���]��׃�Ρ���ˣ��l�FITO-PENꎘO����茦���������С����ǣ���茦�ضȷdz����У���43.4����C -1����ֵ��ע����ǣ��x�����z�ĺ�Ȍ��ض�-���푑��r�g���@��Ӱ푡��x�����zԽ���_����ƽ������ĕr�g��Խ�L�����⣬���x�����z̫������0.5mm���r���y�������������^�����M�в�������ˣ����x�����z�x����1���ĺ�ȡ�Ȼ�ض�ֵ���������Ӌ�㣩������ݣ�C����Ӌ�㉺��ֵ��ԓ�������H������߉��������֮�g�����Pϵ�Ĝʴ_�ԣ����ҿ���ͬ�r�@�Üض�ֵ��

�����x�ӂ���������-�����У��
�������x�ӂ���������ʽܛ�ֱ������ܡ�
�����������ɵ��c�ɾ��̚��w�ӵ�ܛ�ֱ��У��Ԍ��F�|��һ�w�����x����ӂ������ڲ�ͬ�����µ������̖ݔ�뵽����ϵ�y�У����^̎����ݔ�����Ԍ��r���ƙCе�ֵ�ץ�Մ�����ԓץ�ֿ��Ԝʴ_����ס��ጷ�һ���p���ƹ����2.3 g���������e����صĆ�⏣�2.0ǧ�ˣ������⣬ץ�ֿ�����ʰȡ�ӟ�Ľ�����263��C������ס�͜صĸɱ���-79��C�������ڱ��ֺ�ጷ��^�����^�쵽�����������̖�����������x����ӂ��������г�ɫ���ߵ͜��ԡ�

�����ݶ��x�����z���|��һ�w��ܛ�w�C����
������֮���о��ˆT�_�l��һ�N����늈��T�����Ƃ��ݶ��x�����z�ķ���������늈��ĸБ��£���x�ӽ�����ꖘO��ꎘO�γɝ���ݶȡ�ͨ�^�⽻�����z�Mһ���̶�����ʹ����Һ�ÓQ���@���ݶ��x�����z��������x�ӽ������ݶȣ��ݶ��x�����z�ڃɂ�늘O֮�g���F��ģ���ݶȲ���������Ă��������IJ�����@Щ�����ݶ��x�����z�������x����ӂ������@ʾ�����`���ȣ��������z�y����300 Pa��2.5 MPa���Լ���ɫ���;��ԡ����ң������ݶ��x�����z���x����ӂ������Mһ�����ɵ���ܛ�wץ���С��@Щܛ�wץ���p�ء�������w�����Ѓ�����ץȡ�͂��������������ژO�ˏ��s�l���µđ���ǰ����
���ĵ�һ���ߞ��K�ݴ�W����Դ��ʿ��ͨӍ���ߞ����h������
���P����朽ӣ�
1. Y. Ren et al. Electric�\Field�\Induced Gradient Ionogels for Highly Sensitive, Broad�\Range�\Response, and Freeze/Heat�\Resistant Ionic Fingers. DOI: 10.1002/adma.202008486
https://onlinelibrary.wiley.com/doi/10.1002/adma.202008486
2. Y. Ren et al. Ionic liquid�Cbased click-ionogels, Sci. Adv. 2019, 5, eaax0648.
https://advances.sciencemag.org/content/5/8/eaax0648.full
3. Z. Liu et al. Poly(ionic liquid) hydrogel-based anti-freezing ionic skin for a soft robotic gripper, Mater. Horizons 2020, 7, 919�C927.
https://pubs.rsc.org/en/content/articlelanding/2019/mh/c9mh01688k#!divAbstract
4. L. Liu, Z. Liu, Y. Ren et al. A Superstrong and Reversible Ionic Crystal�\based Adhesive Inspired by Ice Adhesion, DOI: 10.1002/anie.202100984
https://www.onlinelibrary.wiley.com/doi/abs/10.1002/anie.202100984
- �|�A��W������/���ܫh�Fꠡ�Nat. Commun.�����x�����z���F�����W����ӛ���������Q�߹��� 2025-05-19
- �m�ݴ�W����褽��� AFM�����ژO�˭h����Ԯ�Ķ�ܹ�W�x�����z 2025-05-18
- ���ݴ�W�Ε��� Nat. Commun.���ߏ��g�w�S�ͺ��x�����z 2025-05-12
- �Ϲ�����f�F� CEJ������MXene���|�Y���ĉ���x�ӂ���������ɴ������� 2024-02-02
- �п�Ժ�K�ݼ{�������E�о��T�F� AM��һ�N���ڿɴ�����ӵ����ԏ��gˮ���x�ӂ����� 2023-07-07
- ɽ�|�r�I��W�������n�}�M��Mater. Horiz.������Ч�����Ϻ؏��ğɹ��p�W�j�x��Һ�w���z�������w�\�ӱO�y 2023-01-13
