���ڣ����ϿƼ���W��ƽ��ڈF������Կ���s���Ƥ�w����ȡ�����Mչ��ͨ�^��������Ȼ���z���ױ��昋��ʯīϩ�Qֱ��У��Ƶ��c���wƤ�w��ƵĶ�ܸ�֪�������������Ƥ�w�����P�ɹ��Ԙ��}�顰Stretchable Vertical Graphene Arrays for Electronic Skin with Multifunctional Sensing Capabilities���l����Chemical Engineering Journal��.
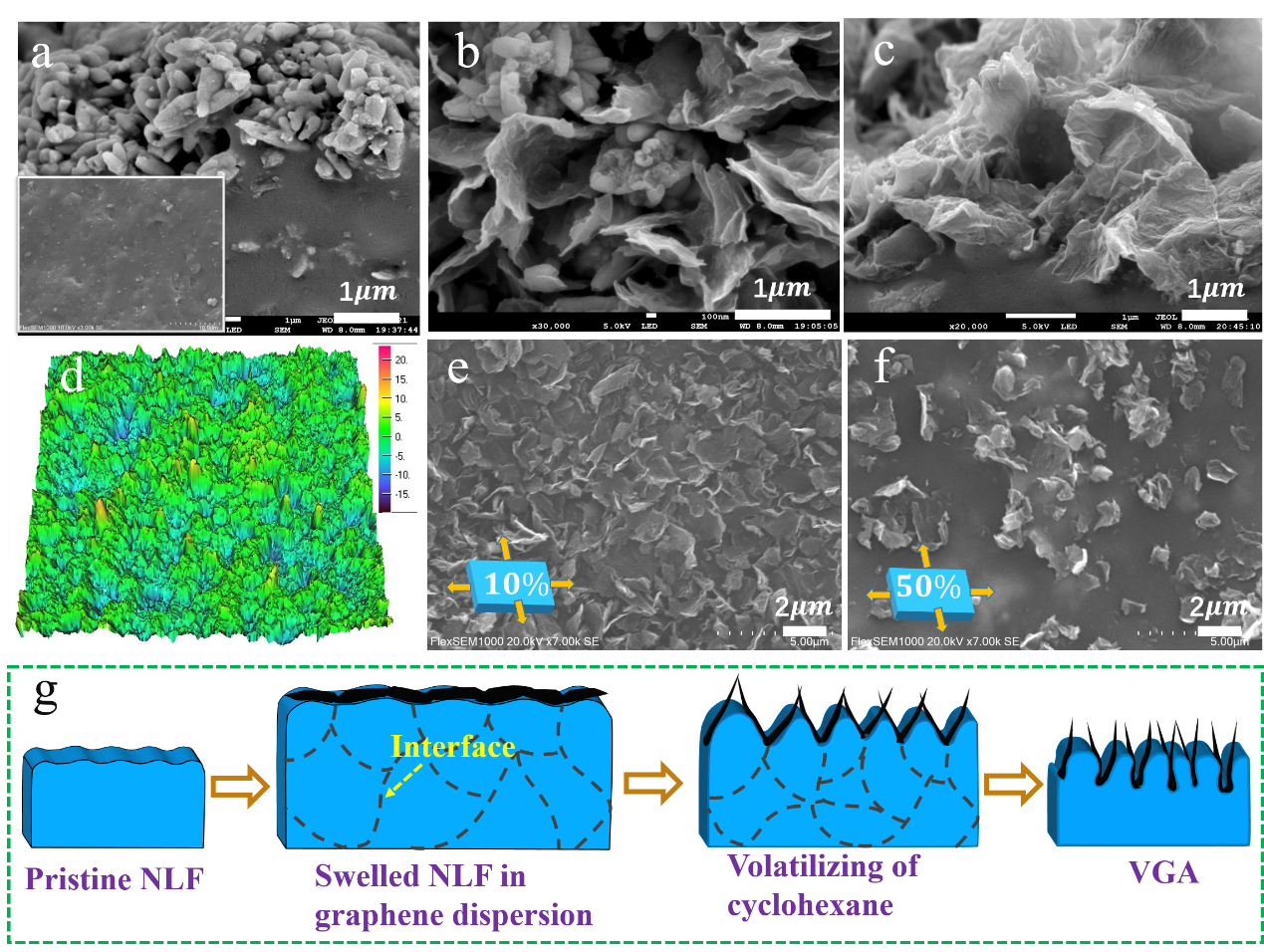
�D1�Qֱʯīϩ��е��ΑB�Y�������γəC��
���Č���Ȼ�z�鱡Ĥֱ�ӽ�����ʯīϩ/�h�����ɢҺ�У��h��������Û��Ȼ�z�鱡Ĥ��ͬ�r���ʹʯīϩ�����ڱ�Ĥ���档�h�����ړ]�l�^���У����±�Ĥ�����տs��ԓ�^��һ����ʹ�ø����ڱ�Ĥ�����ʯīϩ��D����ʹ��ʯīϩƬֻ�ܲ���ճ���ڱ�Ĥ���档��һ���棬��Ȼ�z�鱡Ĥ��ͨ�^���z���ۼ��γɣ��h��������Û��Ĥ�^���У����Ɖ����z����֮�g�Ľ��棬ʹ�ñ�Ĥ�����տs�^���У����z�w��֮�g�γ��g϶���D1a����ʯīϩƬ�����ڱ�Ĥ�IJ����S�����z�w����׃�ζ�׃�Σ�ʹ�䱻�Ƕ�����z�w���Ŀ�϶�У���ʯīϩƬδ�����IJ��քt�S����Ĥ���տs�N�����γ����Qֱ��У��D1b-d�����������p�S�������첻ͬ�L�Ⱥ��^�쵽�Qֱ�������ʯīϩ�����N���γɣ��D1e-f����

�D2 ���Ƥ�w��������������푑��О�
���Ƥ�w������2.5Pa�ĉ������ɮa��푑����əz�y��֩������������Еr��푑���̖���D2b-e��������ֻ�������͚�����ʩ�ӻ��Ƴ��^�̮a����푑���ԓ푑������������Qֱʯīϩ��е���ò�����Q���ģ��D2f-g����ͬ�r�����Ƥ�w߀����푑��r�g��6.7ms�����֏͕r�g��13.4ms���졢�����z�y��������2.5kPa~1.1 MPa�������ԣ��D2h-i����
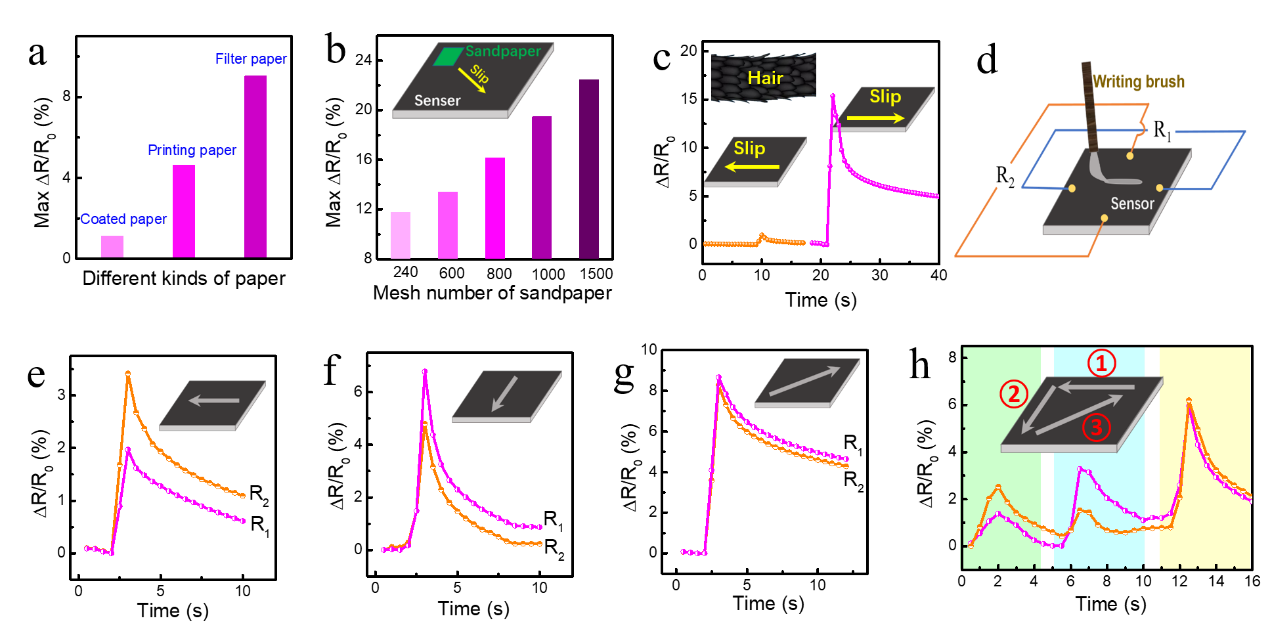
�D3 ���Ƥ�w����ͬ����ֲڶ����w�ĸ�֪���Լ��䑪��
�����w�S��w����[Ƭ�����w���粻ͬ�ļ�������ͬĿ����ɰ�����^�l�����Ƥ�w�քe�ܸ�֪�����ֲڶȵ�׃�����D3a-c���������Ƥ�w�����w���滬�Ӯa����푑���̖����푑��졢�֏��������ԡ�����ԓ���ԣ������R�eë�P�������Ļ��ӷ��D3d-h����

�D4 ���Ƥ�w����͟�ĸ�֪����
����ʯīϩ�����ؓ�ض�Ч����ʹ�����Ƥ�w�����ڸ�֪���պ͜ز���ڹ��գ����Ƥ�w����푑��r�g�̡������Ըߵ����ԡ���һ��̫ꖹ⏊�£�0.5s�Ĺ��Օr�g�Ϳ�ʹ���Ƥ�w���a��׃�����D4a-d�������Ƥ�w�܌����x��30mm�����c��ز���20 ��C�����w�a��푑����D4e-g�������Ƥ�w���ز�ĸ��`����֪���ԣ�ʹ���ͨ�^�ǽ��|�ķ�ʽ��֪���ƵĽӽ����D4h�������㎧�϶������ף����Ƥ�w�Կɸ�֪�����ƵĽӽ���

�D5 ���Ƥ�w����׃�ĸ�֪����
������Ȼ�z�鱡Ĥ�����Ŀ���s�ԣ�ʹ�����Ƥ�w���Ќ���׃�ĸ�֪���������ܸ�֪��0.5%~250%����׃����푑���̖�������õķ����ԣ��D5a-c���Լ������ԣ��D5g-h������ʹ��100%�đ�׃�£����Ƥ�w�Ծ߂䌦�����͚����`���ĸ�֪�������D5e����

�D6 ���Ƥ�w���ڌ��r�O�����w���Cе�ۄ���
�������Ƥ�w�Ķ�ܸ�֪������ʹ��߂䌦���w�M�τ����ęz�y���������磬�����ڙz�y���w��ȭ-�]ȭ-��ȭ�Ą������D6a-b����ͬ�r�����Ƥ�w���ɵ���и����ڙCе�ۊA�ߣ������ڱO�؊A�ߵ��Ƅӡ��ǽ��|��֪���w�c���Ƥ�w�Ĝز��Լ�ץ�����w�Ȅ�����
Ҧ���������Tʿ�о������m�m��Փ�Ĺ�ͬ��һ���ߣ���ƽ�������ϲƽ��������Փ�Ĺ�ͬͨӍ���ߡ����ϿƼ���W��Փ��Ψһ������λ��
ԭ��朽ӣ�https://doi.org/10.1016/j.cej.2021.134038
- ��������������/鐾��`�F� JMCA: ��������/ʯīϩ�����z�ķּ���Y�����F���W��늴����μ��� 2025-06-19
- ���ڼ��g��Wʷ���|�� Carbon������ʯīϩ-�{���w�S�؏ͺϱ�Ĥ�����ޏ͑�׃/����pģ���������OӋ���ڿɴ��������O�y�đ��� 2025-05-28
- ����������W���Ԗ|���ڈF� Nano-Micro Lett.: ̼����������/�P�����w�S/����ʯīϩ@ZIF-67�p��ͺϚ����z���b��׃���ό��F���������D�Q�c늴����� 2025-04-28
- �Ї��ƴ����d�����ڈF� AFM����ȻƤ�w���l�Ķ�����gƤ������Ƥ�w 2025-05-27
- �����ִ�Źٱ�Ժʿ�������о��T�F� Nano lett.������ˮ�����Ƥ�w�Ĝؿ�푑��w�S�ػ� Janus ����ˮ���z 2025-05-09
- ������S�ƽ���/���M���ڡ����t��һ�tԺ����ˇ�����t�� AFM�����������ӵĶ�ģ�B�������Ƥ�w�NƬ�������Ԃ��ڌ��r�O�y�c�ί� 2025-02-24
- �����W�i־��Ժʿ�F� Nat. Sustain.: �O���Ѽy�Uչ����Ȼ���z�W�j�����W�OӋ 2025-05-09
