��Ȼ�������wϵͨ�^�B�m���Q���Ɖ��Լ������{���C�ƣ����F���s���ɿص��\�әC�ܡ��OӋ�Ƃ���������ӡ��Ԅӿ��ƹ��ܣ����܉��l���m�\�ӵ�ܛ�w�C��������ԓ�I����������y�}�����y�c�����y�ԏ��������w�е�����푑������ơ������{����������Ŀǰ�������ܛ�w�C����ͨ�^�ӑB���̼��ٿ،��Q���Ɖ��c�؏ͣ����F������m�\�ӡ�һЩܛ�w�C�����������ړ�Ч������ʎ���W�����γɷ�����·�����F�ӡ��\�ӵ��Ԅӿ��ƣ����ǣ��@Щ�\��ͨ������ʎģʽ���OӋ����ƽ�����l�����m�\��������ܛ�w�C���˾�����Ҫ�ĿƌW���x�������ڎνY������Ҫ�ԣ�ܛ�w�C�����ؓ�Y�����ӿ����Լ��l�\���е����������漰��
���գ��㽭��W�������ڡ������������c�Ϸ��Ƽ���W�邥������푑���ˮ���z�Ƃ���в�ͬ�ؓ�Y����ܛ�w�C���ˣ����F���o�B���l���µ��l���m�\�ӡ��о������ؓ�Y�������˾ֲ�׃�ε��P�ԣ��p�@�P�����ړ�Ч���Լ����D�\�ӵ��������Թ�ͬ�x���ؓ�C���������{�����ܣ��Ķ����F�o�B�̼��µ��l���m�\�ӡ�
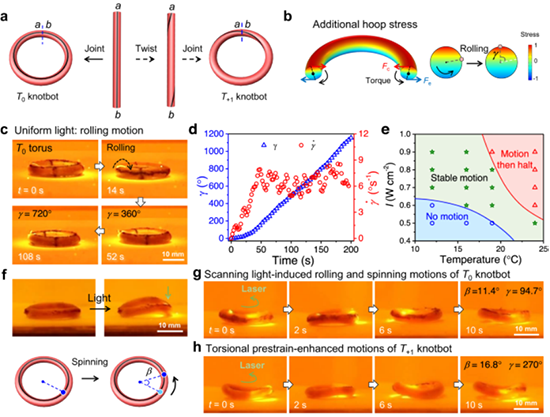
�������ø�����ˮ���z�Ƃ��˲�ͬ�K�Y�Y�����ؓ�C���ˣ������A�h�����~�Y�����~�������_�T�Y��Solomon link�������l֮�ǽY��Star-of-David link�������o�B�������F�˳��m�ĝL����rolling�������D��rotation�����\�ӡ��о����K�Y�ߴ硢�����Լ����Տ��ȡ���������،��ؓ�C�����\�әC�ܵ�Ӱ�Ҏ�ɡ�ͨ�^��Փģ���Mһ���C����ԓ�����{�����\�әC��Դ���ؓ�Y���T�����A��׃�����ٿ�����Π�׃���Լ����ڱ�Ч���ąfͬ���á�����ؓ�C���˿����ڈ����ض��΄գ������D�X݆����Ʒݔ�\�ȡ�
�D1.�A�h���z�C�������o�B���ӑB�����µ��B�m�\�ӡ�

�D2. ���~�Y�ؓ�C�������o�B�����µ��B�m�\�ӡ�

�D3.��N�K�Yܛ�C���˵��l���m�\�ӡ�
Փ����Ϣ��
Qing Li Zhu, Weixuan Liu, Olena Khoruzhenko, Josef Breu, Wei Hong, Qiang Zheng, Zi Liang Wu, Animating hydrogel knotbots with topology-invoked self-regulation, 2024, 14, 300.
https://www.nature.com/articles/s41467-023-44608-x
- ���������/�S��܊�F� AFM�����ڷ��εĴ̼�푑��Կɻ����Ҝس��L�⣨RTP���ۺ��� 2025-07-15
- ���Ͻ���κ�F� AHM������С����ˮ���z�Ĺ�푑��Թ���ϵ�y���M���p���ޏ�-M1/M2�;��ɼ����cʩ�f�����Ľ������� 2025-06-10
- �|�A��Wʷ��ꖽ��ڈFꠣ������w������푑��Ԙ�����Ӽ{�����z�Ɍ��F���ԷΓp���������{���Ϳ��������ί� 2025-05-15
- �m��������WţС��/�����܈F� ACS Nano: �Ⱥ�����늈������Զ���ˮ���z���� 2025-07-14
- ���ݴ�W�����ƽ��ڈF� IJBM��ؓ�d�~�Ȳ����ݵ��h��푑��zԭˮ���z�ί������ڵ��о��ɹ� 2025-07-14
- ������������/������ڈF� Macromolecules ����Փ�ģ���֧���Y���{������x�����ߏ��gˮ���z 2025-07-12
- ������������ֽ��ڡ����½��ڡ��w�θ����ڈF� NSR������ˎ������Ⱦ���\�Ӳ�λ����ȫ�^�̹�����ȡ�����Mչ 2025-06-12
