�S����Ӽ��g���˹����ܵİlչ�����Ԃ����������Ƥ�w���ɴ����O�䡢ܛ�C���˵ȶ�N������������Խ��Խ����dȤ��Ŀǰ���ш�������Ԃ����������ͨ�^�����Ԍ�늲��Ϸ�ɢ�������w���w���Ϳ�������ԏ����w�������Ƃ���ɵġ�Ȼ�������ڄ��Ԍ�늲����c���ԏ����w���w֮�g��ģ���������������늾W�j���Ѻͻ��ӵȓp�����������Ԃ������ķ����Խ��͡����⣬���Ӿ��зǽ��|�ԡ����ԡ��h�̿��Ƶȃ��c��ʹ�û��ڴ��ӵ�ܛ�C�����ܵ�Խ��Խ����Pע������ڂ��y���ɴ����w��ֱ�ӷ�ɢ�ڏ����w���w���Ƴɵďͺϲ��ϣ�����׃Һ�д����w���ڴň��µ��\�Ӳ������ܵ����ƣ����F���ܸߵĴ���׃Ч����Ŀǰ���ڴ���׃Һ��ܛ�ͺϲ����ձ�ȱ�����������������Ќ����ṩ�h����Ϣ�͌��F���_���Ʒdz���Ҫ��

�D1.ժҪ�D
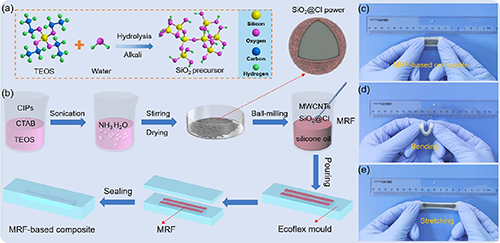
�D2.��늴���׃Һ���ܛ���ԏͺϲ��ϣ�cMFEC�����Ƃ��^�̺͌���D
�����_�l����׃Һ��ܛ�ͺϲ��Ϸ���đ��È������Y�����Ԃ������ʹ���ܛ�C���˵����ԣ��Ї��ƌW���g��W���d���n�}�M���������һ�N����Һ�w���w�Č�늴���׃Һ���Ecoflexܛ�����w�ͺϲ���cMFEC�������̼�{���������׃Һ�У��Ƃ���һ�N��ߴ���׃Ч����늂������ܵČ�늴���׃Һ�����������Ԃ�������Һ�w���w�������ԏ����w���wEcoflex��Ĥ���OӋҺ�wͨ������䌧늴���׃Һ��ʹ��Ecoflex�ܷ��Ƃ��ˏͺϲ���cMFEC���D2b����cMFEC�������õ����쑪׃�������ܺ͏�����֪������cMFEC���ԱO�y��Ӵň���׃�������F�����������������ԡ��ڴ˻��A�ϣ������˴ſ��{���ȳ��dƽ�_������165 mT�ň��µij��d��������ň��µij��d���������һ����cMFEC߀���F�������О顣����cMFEC���Ƶ����ܴ��ӊA���������ڴň�������ץȡ���D�ƺ�ጷŸ��N�Π�����w�����⣬�Y��cMFEC�Ă������ܺʹ����О飬�O�y����ϵ�y���Ԍ��r�O�y�A�����Ą�����B����ˣ����о������׃Һ�����Ԃ�������ܛ�����еđ����ṩ��һ�N�µĺ�����ԡ��ͺϲ���cMFEC�Y���˴���׃Ч����늂������ܣ������Ƥ�w���ɴ�������O��ʹ���ܛ�C���˷�����ЏV韵đ���ǰ�������P�о��ɹ��ԡ�Conductive magnetorheological fluid (cMRF)-based flexible sensor with adjustable stiffness for magneto-mechanical dual-response and soft actuator�����}���l����Chemical Engineering Journal�ڿ��ϡ�Փ�ĵĵ�һ���ߞ��Ї��ƌW���g��W���̿ƌW�WԺ��ʿ���O��t��ͨӍ���ߞ����d�����ں�ɣ����ʿ��
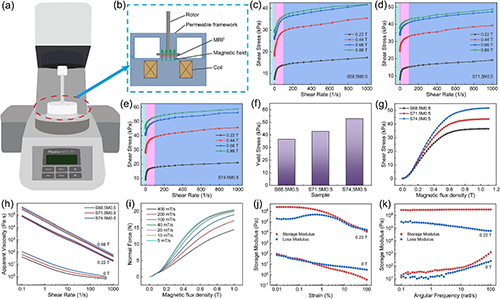
�D3. ��늴���׃Һ����׃����
����׃Һͨ�������������w����ɢ���dҺ���Ƃ���ɣ����Ѓ��������W�����c��Ч�Ŀɿ��ԡ��ڴň������£����з�ɢ�Ĵ����w����Ѹ�ٵ��شň������γ�朠�Y��������׃Һ��ţ�D���w��B�D׃��Bingham�����w��B���c����׃�����w����������׃���ܲ�����ȣ�����׃Һ�еĴ����w���ڴň��µ��\�Ӳ������ܵ����ƣ����F���ܸߵĴ���׃Ч����ԓ��늴���׃Һ�ڴň��µ�ճ�������˼s�������������D3h�������̼�{���������ӄ������˴���׃Һ�ij��������ԣ�ͬ�rҲ�x���˴���׃Һ늂��е����ܡ�

�D4. �ͺϲ���cMFEC�Ĵ�-�Cе�p��푑���������
�ͺϲ���cMFEC����ͬ���쑪׃�Ă���푑������������������O�y����׃�εđ�׃���������D4e������cMFEC�������^����ʩ�әM��ň�����������@�����ӣ��D4f�������F��cMFEC�Ĵ�-�Cе�p��푑����ԡ�cMFEC���Ѓ����Ă��з����ԣ���1000������ѭ�h�������푑������ֲ�׃���D4i�������⣬�������õ����g�ԣ�cMFEC߀���F��������׃�εĸ�֪�������D4j�������cMFECճ�N������ָ�P���ϱO�y�\�ӡ�����ָ�P���Բ�ͬ�Ƕȏ����r��cMFEC���a�������Ă���푑����D4k�������������������w�\�әz�y�Ы@�Ñ��á�

�D5. �ͺϲ���cMFEC�Ĵſ��{������
��늴���׃Һ�ĸߴ���׃Ч��ʹ�Ïͺϲ���cMFEC���дſ��{���������ԡ���ˣ���cMFEC�c3D��ӡ��ABS�Y���M�b�ɳ��dƽ�_�����dƽ�_��165 mT�ň��еĘO���d�����_��42 g������ň��r�����100%���D5f�����O���d��������cMFEC�ډ��s�^���б��F���������������ԡ������أ���cMFEC�������^���У�Ҳ���ڴŸБ������������ԡ�ʹ��cMFEC�Ғ�100g�����300 mT�ň��µ�����λ�Ʊ���ň���С�s41%���D5g-h�����f��cMFEC�����섂���ڴň��������@�����ӡ��ſ��{�����ȵ��^ԭ���nj�늴���׃Һ�еĴ����w�������ň������γ�����朣��D5i�����Ķ������ˏͺϲ��ϵĄ��ȡ�
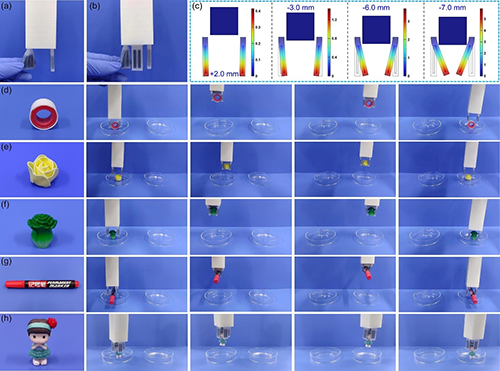
�D6.�ͺϲ���cMFEC�Ĵ����О�
��cMFEC�c�п�ABS�Y���M�b�OӋ�����ܴ��ӊA��������������Ԫ�����о��ˊA�����Ĵ���׃�Ρ����F�������п�ABS��Ͳ�w�Ȳ���ͨ�^�B�U�������Ƅӣ����ƊA����ץȡ��ጷ����w���S�����F�����Ƅӣ�cMFEC�ĴŸБ���������������ď���׃��Ҳ���D6c�����S����F�����Ƅӣ�cMFEC�ܵ��Ĵ�����u�pС������ʧ���A�o��cMFEC���������ď��Զ��֏ͣ��Ķ�ጷű��A�ֵ����w���D6d-g����߀��ʾ�˻���cMFEC���ĊAצ�A������������ץȡ���ص���ż��ߣ��D6h����

�D7. ���ܴ��ӊA�����Č��r�O�yϵ�y
�Y�Ϗͺϲ���cMFEC�Ă��������ʹ����О飬�OӋ�����ܴ��ӊA�����Č��r�O�yϵ�y���D7a����ͨ�^���ץȡ���D�ƺ�ጷŌ����Y��cMFEC�����������^���еĂ�����̖׃��Ҏ�ɡ��_ʼ�r��cMFEC�Aצ̎����Ȼ��B��������̖���ַ��������ƄӴ��F���ƊA����ץס���w��˲�g�����ڴň��͏���׃�ε����ã�������̖�������ӡ����D�����w���^���У�������̖��u�p������ጷ����w��˲�g��������̖�ٴ�Ѹ�������S����u���䵽�ӽ���ʼֵ���D7c����������̖����һ���ķ����ԣ�����ͨ�^���r�^��cMFEC������̖��׃�����O�y���܊A������ץȡ���D�ƺ�ጷń�����
�C�����������о��_�l��һ�N���ڌ�늴���׃Һ��ܛ������cMFEC���Ԍ��F��-�Cе�p��푑����ԡ�����һ�N��׃��������cMFEC�����R�e10-50%�����쑪׃�������F��늷����ԣ�߀���Ը�֪�����Ƕȡ����⣬��߀�����ڽM�b�ſ��{���ȳ��dƽ�_�����ܴ��ӊA������չ�F���ڴ���ܛ�C���˷���đ���ǰ�������о����Ƃ���ڴ���׃Һ�����ԏͺϲ����ṩ��һ�N�µĺ�����ԣ��_�l��չ�˴���׃Һ�����Ԃ�������ܛ���ܙC�����I��đ��È�����
ԭ��朽ӣ�
Yuxi Sun, Min Sang, Yunqi Xu, Zhentao Zhang, Shilong Duan, Yu Wang, and Xinglong Gong, Conductive Magnetorheological Fluid (cMRF)-Based Flexible Sensor with Adjustable Stiffness for Magneto-Mechanical Dual-Response and Soft Actuator, Chemical Engineering Journal, 2024, 489: 151229. DOI: 10.1016/j.cej.2024.151229.
https://doi.org/10.1016/j.cej.2024.151229
