西安交大邵金友、田洪淼團隊《Sci. Adv.》:開發出傳感觸發變剛度智能粘附結構
壁虎能夠在豎直墻壁以及天花板表面靈活自由的爬行或長時間靜止不動,對于接觸表面表現出強大且可逆的粘附能力。以其腳掌末端結構為研究對象,科研人員已經能仿制出類似的干粘附結構,并在特種機器人、智能機械手、醫療工程等領域展現出不可替代的應用潛力。盡管近二十年來干粘附仿生結構取得了諸多研究進展,但人造結構與生物活體組織在表面適應性和粘脫快速切換方面仍存在顯著差距。開發具有優異表面適應性及其快速粘脫切換能力的干粘附結構是其工程應用的挑戰性難題。
從“單一功能”到“系統集成”
近日,西安交通大學邵金友、田洪淼團隊提出了一種基于傳感觸發的變剛度智能粘附結構,不同于傳統研究僅關注結構形態的仿生策略,該研究結合了生物體肌肉組織和傳感神經的耦合功能,即基于界面接觸狀態的實時感知,通過磁流變效應實現對粘附結構剛度的主動調控,達到非平整表面自適應附著及其粘附/脫附快速切換的目的。當粘附結構接近目標表面時,結構剛度調整為軟狀態(移除磁場),以實現目標表面的共形接觸;在拾取目標物體時切換到硬狀態(施加磁場),以實現目標表面的高強度附著;在釋放物體時再次恢復到軟狀態(移除磁場),以實現脫附行為,如圖1所示。智能粘附結構的自適應變形和形狀鎖定能力,使其能夠在甚少考慮表面形態或紋理的情況下對各類表面進行操作,已成功實水杯、高爾夫球、西紅柿等日常生活常見非平整表面物體的拾取與釋放。此外,歸結于磁場的快速切換特性,智能粘附結構的響應時間可達毫秒級別(約100 ms),類比于哺乳動物骨骼肌的響應特性,突破了粘附結構在高節拍操作應用中的技術瓶頸。相關研究成果以“Sensing-triggered stiffness-tunable smart adhesives”為題發表《Science Advances》上,西安交通大學王鐸睿博士為論文第一作者。
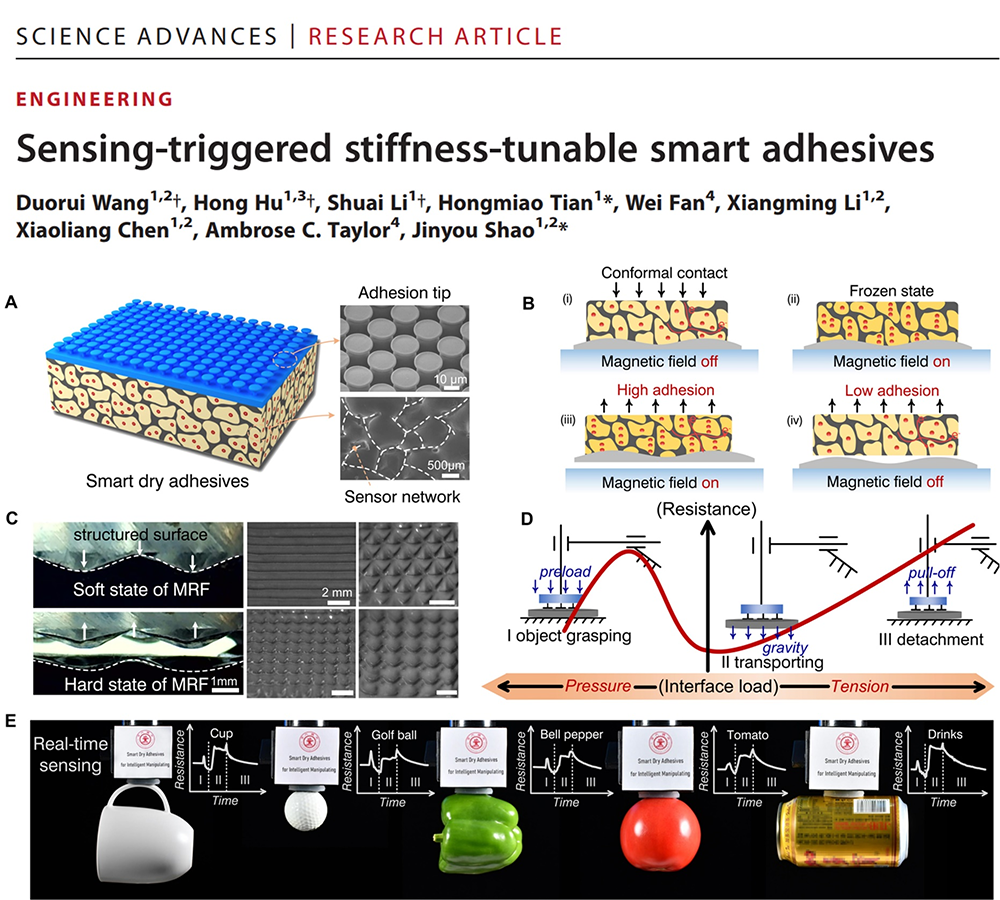
圖1 基于磁流變效應的傳感觸發變剛度粘附結構設計思路
剛度調控下的非平整表面粘附增強機制
智能粘附結構通過實時剛度調控,實現接觸過程軟狀態和脫離過程硬狀態的控制,達到目標表面的保形接觸和形狀鎖定。相比傳統單一剛度粘附結構,變剛度智能粘附結構對于曲面乃至非平整表面的粘附性能提升一個數量級,如圖2所示。有趣的是,智能粘附結構由于在脫離過程中切換到硬狀態,導致在整個拉拔過程中保持穩定的“U”形接觸。不同于傳統硬質粘附結構的點接觸以及軟質粘附結構的“N”形接觸,這種恒定的“U”形接觸提供了相對較大的接觸面積、較小的剝離角以及切向摩擦作用,有利于提高粘附性能。此外,研究團隊建立了基于cohesive單元的力學模型,探究了剛度調控下仿生結構在非平整表面的粘附增強機制,如圖3所示。在接觸和拉拔過程中,智能粘附結構更為勻化的界面應力分布是其粘附增強的關鍵;同時,智能粘附結構界面在拉拔過程中所受到的法向應力和剪切應力均處于較低水平,對界面剝離會產生有效的抑制作用。
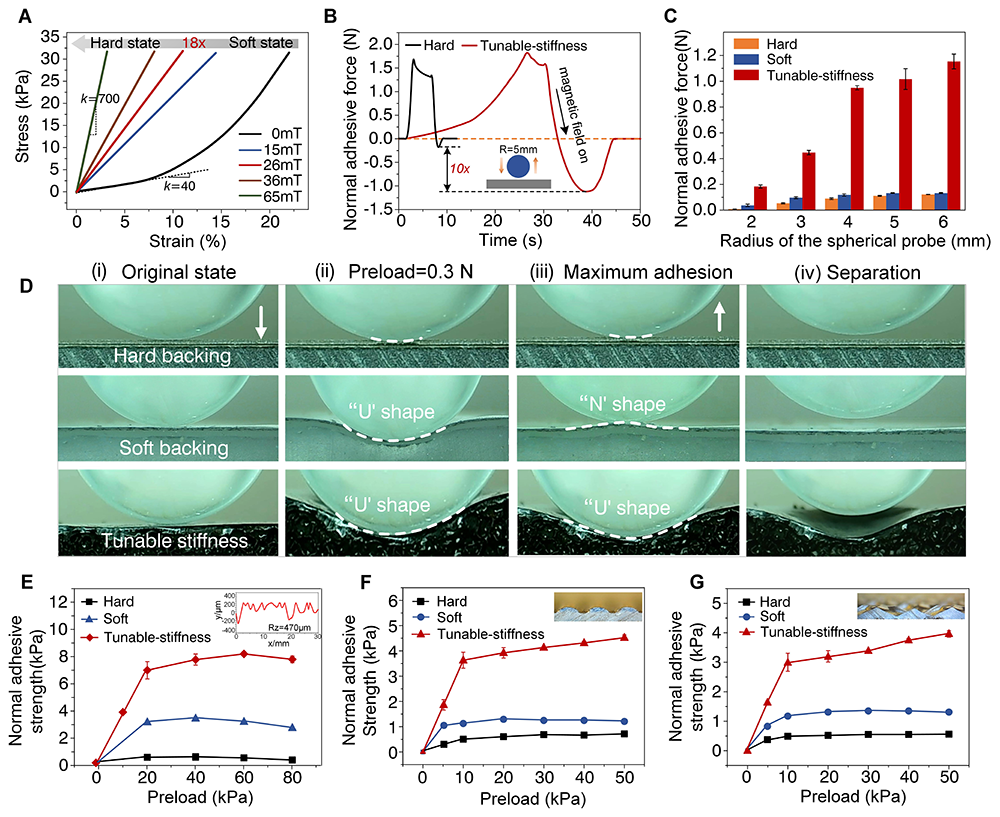
圖2 智能粘附結構的粘附特性
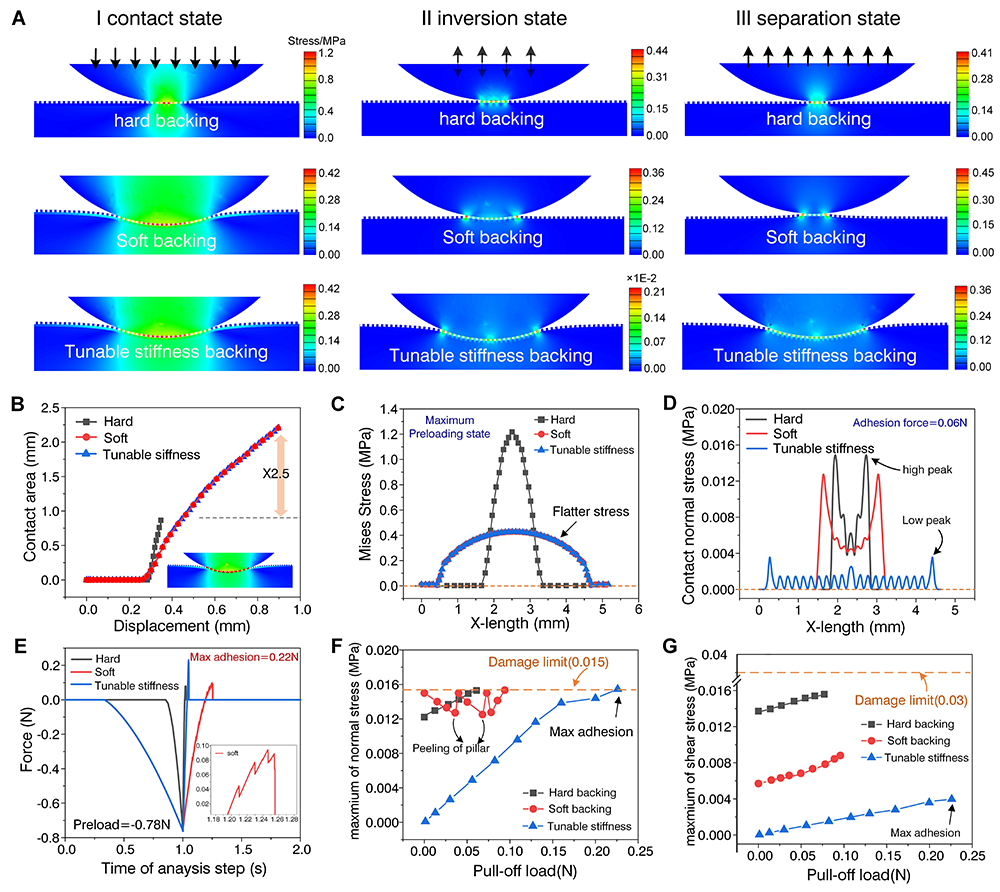
圖3 智能粘附結構的粘附增強機制
傳感觸發工作機理
在粘附過程中,界面接觸狀態的實時監測對于剛度調控尤為重要,其決定了粘附結構何時變硬、何時變軟,達到穩定高效抓取的目的。受蜘蛛感知系統的啟發(基于納米裂紋結構的斷開-重連效應),研究團隊提出了一種基于碳納米管的聚氨酯網絡-磁流變材料的復合形式力學傳感器,用于接觸界面力學信號的監測,如圖4所示。在外力作用下,復合結構中的碳納米管涂層會產生裂紋,從而影響電阻的變化。更重要的是,涂層中裂紋的數量和密度可以通過對復合結構施加不同的預拉伸來實現調控,以此完成傳感器靈敏度的優化制造。該傳感器在面向不同輪廓目標(平面或曲面)和不同載荷形式(壓縮載荷或拉伸載荷)時,均表現出良好的靈敏度和線性度,滿足了智能粘附結構在拾取復雜形狀物體時的界面感知要求,提供了一種僅通過記錄電阻變化來監測粘附過程的創新途徑。
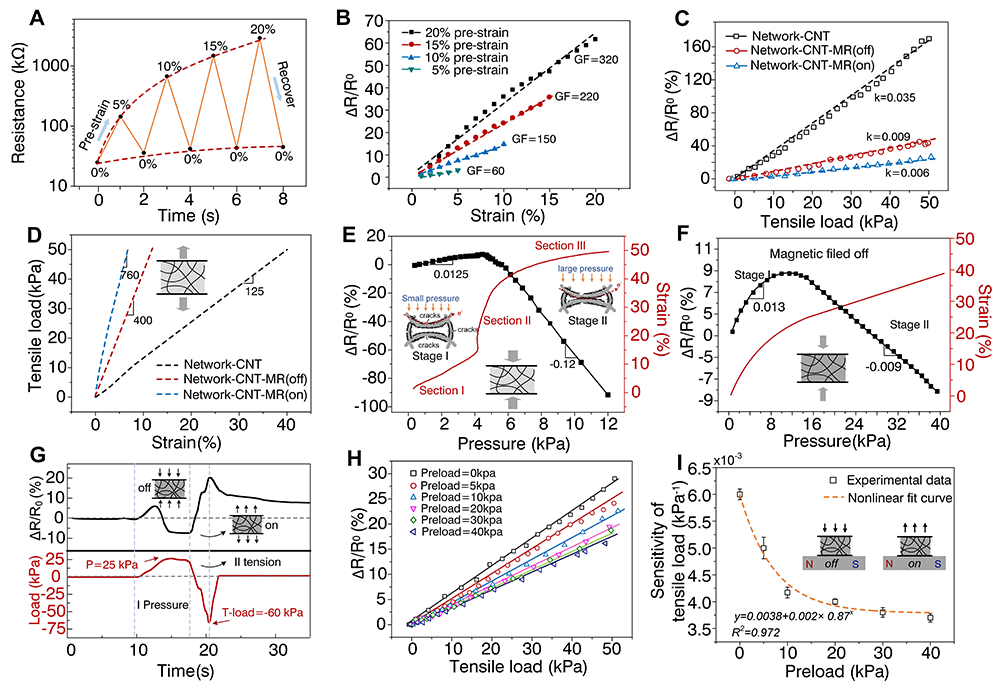
圖4 智能粘附結構的傳感性能
智能粘附操縱展示
智能粘附結構能夠通過剛度調控產生具有顯著差異的高/低附著力。為此,研究團隊將一體化智能粘附結構集成到機械臂末端,成功實現了對非平整表面物體的抓取、轉移和釋放操作,如圖5所示。在操作過程中,無論是接觸階段、轉運階段還是釋放階段都可以觀察到具有顯著特征的電阻信號。更重要的是,由于磁流變脂對外部磁場的快速響應能力,智能粘附結構的粘附切換時間低至100 ms,達到了哺乳動物骨骼肌的收縮/擴張水平,遠遠高于傳統基于光控、熱控等粘附切換方法的響應時間,滿足了機器人快節奏應用場景的需求。此外,基于磁場調控的粘附切換策略具有更為簡單的結構配置,相比氣動控制方法不再需要額外的流體通道設計以滿足取放系統的壓力供給需求。
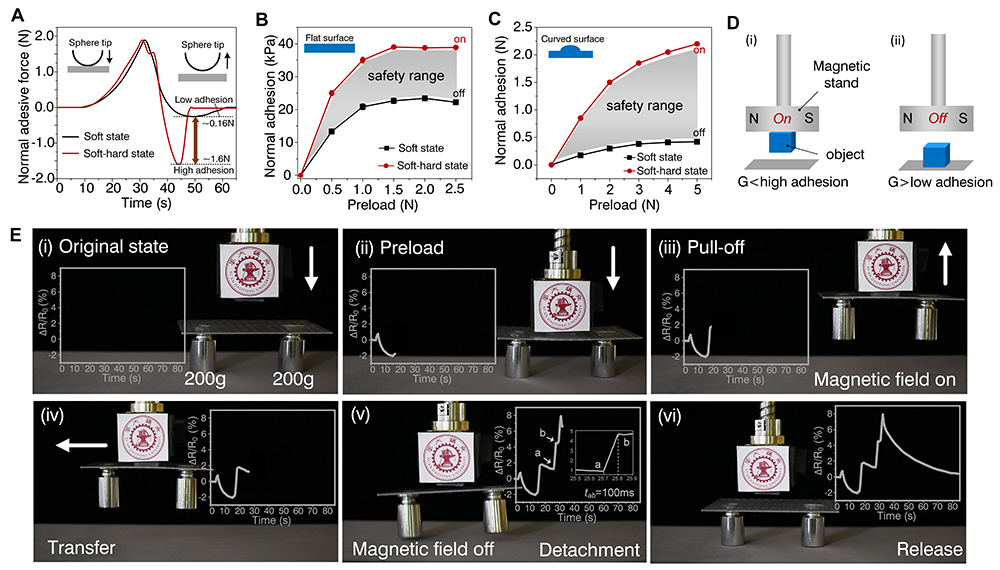
圖5變剛度智能粘附結構的物體操縱展示
小結
邵金友、田洪淼團隊長期致力于微納結構界面仿生粘附相關研究,已經在界面粘附機制、仿生粘附結構制備、智能機器人開發等領域做出諸多創新性工作。與傳統被動式粘附結構不同,本研究提出的新一代干粘附結構,具有典型的智能化主動式粘附特征,更接近于真實的自然界生物體,具有優異的目標表面適應性以及粘附/脫附快速轉化性。更重要的是,肌肉組織和傳感神經的耦合仿生功能結構不局限于匹配壁虎仿生干粘附結構,可拓展至章魚、樹蛙等濕粘附結構,為仿生粘附領域提供一種通用策略,有助于推動夾持、操縱和攀爬等系列化智能機器人的發展。
原文鏈接:https://www.science.org/doi/10.1126/sciadv.adf4051
