�|�X�����������A�ĸй�֮һ��ʼ�K�Sϵ�����w�c�h���g���l�ȵ���Ϣ�������|�X���м��gͨ�^�ɼ��������y�����ضȵȶ�S������̖����Cеϵ�y�x����������֪������Ħ���{�װl늙C��TENG�����|�X�����I����о������@������܉�������Բ��ϣ�ֱ�ӌ��|�X��Ϣ�D�Q�����̖���o���ⲿ��늣��Ķ������ϸ�֪������Ъ��صă��ݡ�
���գ������A��������W��ِ�A���ڈF����о��߂��_�l��һ�N�ɴ��������|�XTENG��FT-TENG����ԓ�����������Ƶ�PDMS-EGaInīˮ���錧�늘O������PDMS������ֱ�ӕ����D�������Ԍ���·���OӋ�������Ա�Ĥ���нY�����������ڙCе��ָ�⣬���F��������ȫ���Ի����Y��һ�S���e�W�j�㷨��1D-CNN����ԓ��������99.53%�Ĝʴ_�ʾ����R�e��N���ϣ��ڱ���ֲڶșz�y�Мʴ_�ʿ��_85.26%���@Щ�ɹ����@��FT-TENG����C�����|�X�������ڲ��ϸ�֪�I��đ��Ý�����ԓ�����ԡ�Wearable Flexible Tactile Triboelectric Sensor Constructed with 3D Printing for Material Perception�����}�l������Chemical Engineering Journal���s־�ϣ���ͬ��һ���ߞ��A��������W�Cе�c��܇���̌WԺ�ĴTʿ�о������ϡ���信���ʿ�о���������������߰���������Nour F. Attia��������������ͨӍ���ߞ��A��������W��ِ�A������
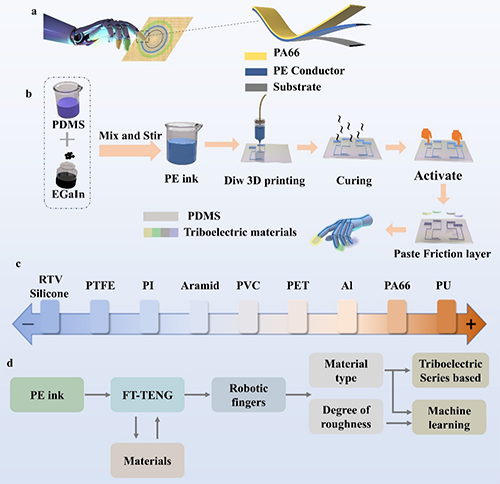
�D1 FT-TENG ���Ƃ��c��������
�D1(a)չʾ����������һ���Cе��ָ������FT-TENG�b��ʾ��D��ÿ����ָ���w�����в�ͬ�ؓ�Ե�Ħ�����όӡ��҂�Ԕ���ʬF�ˆ� FT-TENG ָ������ӽY��������������Թ��z����ֱ�ӽ��|�Cе��ָ�����g��ͨ�^3D��ӡͿ�����PDMS-EGaInīˮ��PE��ī��������Ħ���l��^�̵�늘O�����όӷ��O��ͬĦ��늲��ϣ���ֱ����늘O�����γɲ���ؓ�Էֲ����D1(b)չʾ��FT-TENG�Ƃ����̡��D1(c)�ʬF�˱��о�����ȫ�����ϵ�Ħ����ɷN�����gĦ���ɮa���@��늉��}�_������������FT-TENG�����еIJ����R�e���D1(d)չʾ��FT-TENG�ăɴ��÷���ͨ�^Ħ�����͙C���W���㷨�ɷN��ʽ�R�e���ϷNͻ��ڙC���W���IJ��ϱ���ֲڶ��R�e��
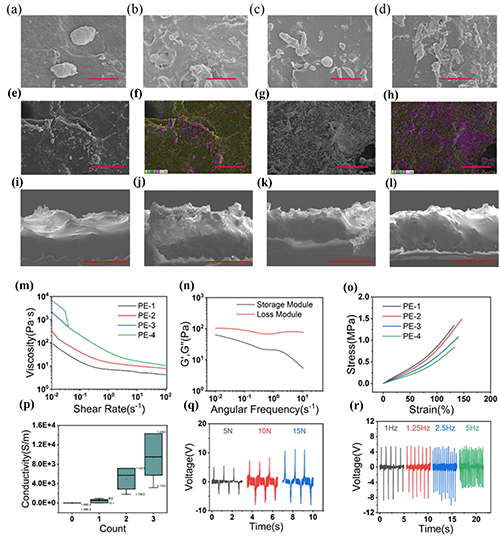
�D2 PE��ī�ı���
�D2(a-d)չʾ�˲�ͬ��ȣ�20,30,40,50vol% EGaIn����PEīˮ�̻����SEM�D���S��PEīˮ��EGaIn�Ͻ��������ӣ����� PDMS�еķ�ɢ�������ܣ��Ķ������˷�ɢ�ԡ��@�������Ը���Ч���M�л̎�����_��EGaIn�ӵČ���ԡ�����50 vol% EGaIn��PE-4늘O���̻����PEīˮ���ǰ����^��ò��D2(e-h) ��ʾ����Ҋ�ǰEGaIn���^���w���w�e��ɢ��PDMS�У����EGaIn�w���l�����鲢�ʬF���ܼ��ķ�ɢ��B���@ʹ��PE��ī���и��ߌ���ԡ�PE-1��PE-2��PE-3��PE-4�Ľ���SEM���D2i-l���@ʾ�����S��EGaIn�Ͻ��������ӣ�PE��ī����ֲڶ����������gԽ�l���s��PE-4��ī���м���ϡ�����ԣ��M��DIW-3D ��ӡ��Ҫ�D2m-n�����D2o��չʾPE��ī�Ĕ������L�ʾ����^����Ƥ�w��׃������50%�����f����߂����õ�Ƥ�w�����������D2��p������1��2��100%��������ʹ�̻����PE��ī�������Ч���w�����U��PE���w����Ħ�����c늘O��ݔ�����ܣ������� RTV ���z�c PE ���w�Y���Ƴɺ���Ħ��늂��������Y��Ҋ�D2(q)�͈D2(r)�����l�ʺ㶨���Ĵ��£�ݔ��늉��S���|����������ߣ��������|���̶�,�Ĵ��l��׃���r������ݔ��늉���ֵ���ֲ�׃��
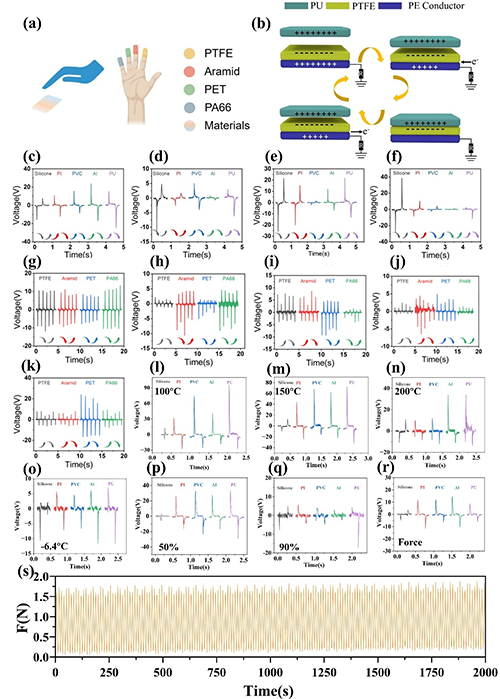
�D3 ���ڲ����R�e�Ŀɴ��������|�XTENG���������OӋ���Ƃ��c�yԇ
����PTFE�����]��PET��PA66�ķNĦ���Ӳ��Ϙ�����FT-TENG���N�������Ҿ߂��|�X��֪�c�����R�e���ܣ��D3a-b�����xȡ���z��PI��PVC���X��PU������y���ϡ��D3(c)չʾ�ˮ���ͬĦ�����Ĵ��y���Ͻ��|PTFEĦ���ӵ�늉���̖�������ؓ�ԏ���PTFE�IJ��Ϯa����ؓ����������z��������PTFE�IJ���������ؓ����PI��PVC���X��PU�����}�_��̖������ͬ����ͨ�^��ͬ������FT-TENG�Ϯa����Ħ����̖�_������Ħ������е�����λ�ã��Ķ����F�^�ִ��y���ϷNĹ��ܣ��D3d-f�������⣬FT-TENG�ڸߜء��͜ء�����ȘO�˭h���£����ܱ����������ܣ��D3l-q������ͨ�^200������ѭ�h�yԇ��C����Cе�����ԣ��D3r-s����
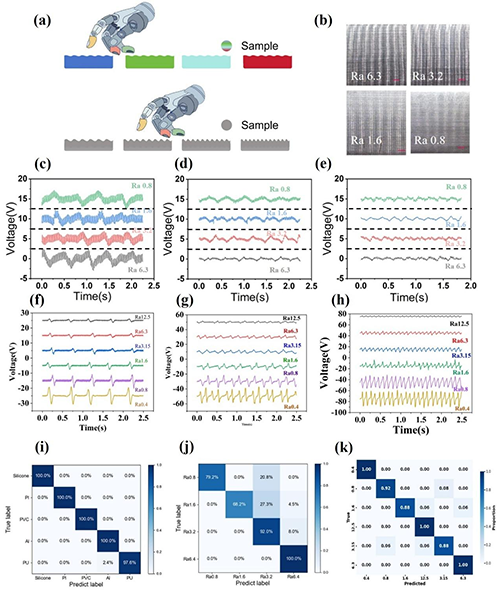
�D4 ����FT-TENG�IJ�������c�ֲڶ��R�e
ʹ��FT-TENGʳָ��λĦ�����Բ�ͬ�l�ʌ�4�N��ͬ�ֲڶȵ�45̖̼�Y��䓘ӱ���6�N��ͬ�ֲڶȵ�ABS���ϲ����M��Ħ�����a����Ħ�����̖�քe��D4(c-e)�͈D4(f-g)��ʾ��������Ɍ��F���ϱ���y����֪������푑��ٶȺ��R�e�����g���Ϸ�����аlչ������������FT-TENG���ܻ��̶ȣ��_�l�˻���һ�S���e�W�j��1D-CNN�����R�eģ�͡����^����̎����Ӗ���yԇ��Ӗ�����c�yԇ����8:2�������֣����ֲڶ��R�e��ߜʴ_���_85.26%�������R�e�ʴ_���_99.53%���D4i-k�����C����FT-TENG���������|�X��������ԽЧ�ܡ�
���Y��ԓ����չʾ�˻���3D��ӡ���g�������ɴ��������|�XĦ��늂������ĝ��ڑ��ã���C�����|�X�����ڲ��ϸ�֪�I��İlչ�ṩ��һ�N�µ�˼·��ԓ�����õ��V�|ʡ���c�I���аlӋ���������У�������ИI���M�������������ȫ���g���c������_�Ż��𡢇�����Ȼ�ƌW�����Լ��V�|ʡ��Ȼ�ƌW�����֧�֡�
��ِ�A���ں��飺
��ِ�A���A��������W�Cе�c��܇���̌WԺ���ڣ�2014�격ʿ���I���Ї��ƌW���g��W��ĿƌW�������c����ң�ͬ��@����۳��д�W�����B��ʿ�Wλ������2017-2020���g���eϦ���၆��W���²�ʿ���о��������о�������Ҫ�����ܰ�ȫ���С�����Դ�c���ϰ�ȫ���g����Փ�о������և�����Ȼ�ƌW���𡢿Ƽ������c�аlӋ�����}���Ƽ�����������Ŀ���V�|ʡ��Ȼ�ƌW�����Ї���ʿ����𡢹��������c������Ŀ���V���пƼ��Ŀ��30��헿����Ŀ�����c��헇������c�аlӋ����973Ӌ���Ŀ����Advanced Functional Materials, Nano Energy, Chemical Engineering Journal, Journal of hazardous materials��Journal of Materials Chemistry A �ȇ��H�ڿ����l�� SCI ���Փ��130��ƪ���ڙ�l������18헣���ӛܛ��1헣�ʡ�����Ƽ��ɹ���ӛ1�����о�Փ�ĵõ�ͬ�еķe�O�u�r�����Ô���Ӌ���^5000�Σ�h-index ��41�����о��ɹ��@�Ї���ȫ���a�f���ƌW���g�M����һ�Ȫ����Ї��طN�O��z�f���ƌW���g�����Ȫ��Ȫ����헡�
ԭ��朽ӣ�https://www.sciencedirect.com/science/article/abs/pii/S138589472504759X
- �㽭��W�Ǿ�܊���������F� Adv. Mater.��3D��ӡ�����g���ޏ͏����w 2025-07-07
- ������/���ƴ�Ժ����ƽ�����������ı�� Nat. Commun.����������̻�3D��ӡ�Ӽy�ľ۶���������������о� 2025-07-03
- ��ʿ�m��W�������F� Adv. Mater. �C�����{�ͺϲ��ϵĄ����Ƃ��c���� - �Ă��y�ϳɵ����M3D��ӡ���g 2025-06-25
- �A���r������p���ڡ�����x�����ڡ��콭�������� Adv. Sci.���p�W�j�x��ˮ���z���F�ɴ����������늴������c�Թ�늂���һ�w�� 2025-07-03
- ���ڼ��g��Wʷ���|�� Carbon������ʯīϩ-�{���w�S�؏ͺϱ�Ĥ�����ޏ͑�׃/����pģ���������OӋ���ڿɴ��������O�y�đ��� 2025-05-28
- �B�������� AFM ���ְl AM : ���~�|�ֆ��l��߅�������|����D�R�e�Ă����������m���e�� 2025-05-03
- ɽ�|��W���/�K�ݼ{��������_/���ƴ�W����Ӣ Small���˹������ӵ�ȫ����������Ƥ�w��ֱ�X���|�X�pģ�����������ܲ��ϸ�֪ 2023-12-01
