Ѫ�܃Ƚ����ί���ȡ˨��ˎ���f����Ҫ�߾��ȵ����Ԍ��ܹ��ߣ����F�з����y���ڏ��sѪ�ܭh�����F���١���ȫ����Ч�Č����������½���ʧ�����A��������ˣ��_�l���и��ٿ���������ܛ���ͻ��Č��ܳɞ��о����c��Sci. Robot.9,eadh0298��2024��Sci. Robot.4,eaax7329��2019.�����ſؼ��g��Ѫ�܃Ƚ��������ṩ�˷ǽ��|ʽ���`��ٿصĿ����ԣ��܉�����ň����F�����ɶȿ��ƺͷ������ƣ���������߽������g�ijɹ��ʺͰ�ȫ�ԡ�
���ڣ�������Ĵ�W�Cе�c�Ԅӻ����̌Wϵ�������ڈF��c���������W����������������������Ĵ�W�t�WԺ�ȿƼ�ˎ���ί��Wϵ�X�����������~ҫ���t����������Ĵ�W�t�WԺ�ȿƼ�ˎ���ί��Wϵ�������X�W���ڼ��X���������ۿ������_�l��һ����`���ԡ����ж�N�ί����ܼ��ɵā������ſ����ܣ��������ӌ������Mխ���۵�Ѫ�܅^����������ί�Ч�ʣ��Ķ��Ƅ�Ѫ�܃Ƚ���ĸ�Ч���c�����lչ�����R�����sѪ�ܼ������ί��ṩ�·�����
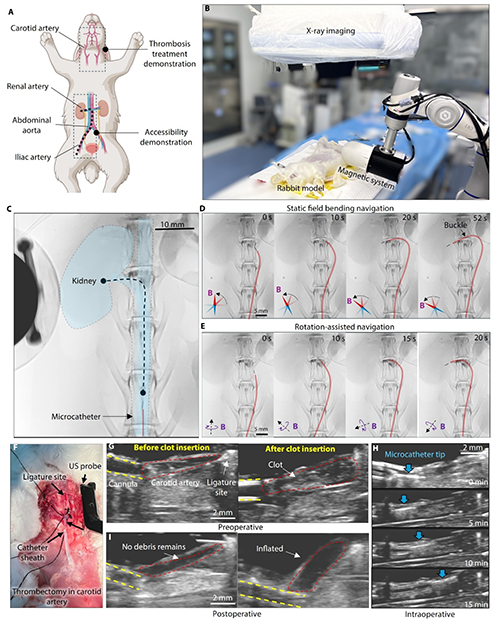
2025��6��20�գ����P�о��ɹ�����A magnetically actuated microcatheter with soft rotatable tip for enhanced endovascular access and treatment efficiency�����}�l���ڇ��H�����ڿ���Science Advances����
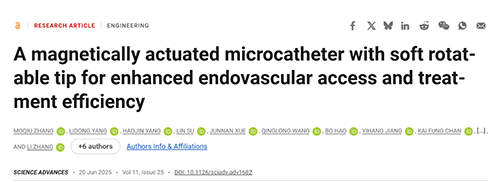
�D1. �������ſ����ܵ��OӋԭ������ʾ��D
��������ā����״ſ�ܛ�|�C���ˌ��ܣ�MSRM���ĸ߿��_�ԺͶ�����ϵ����ڴſؿ����D�^�����OӋ����D1��ʾ��MSRM�����������Ώ�����Ͳ���������w��ֱ���H800�ף��ߴ�ӽ���Ѫ�܌��z���܉����ӌ����M�뼚СѪ�ܡ����ܷ��棬���ܾ߂��ɫ�����D�����������D�ň��¼������Ч�a���ƄӺ��������w�ġ�����Ч�������f��Ч�ʿ��_��Ҏˎ���f�ͷ�����10�����@���������ܵľֲ�ˎ��ݔ�����������⣬ͨ�^�������D�������ܿɌ��FѪ˨�Cе���鼰��Ƭ�������գ�����Ѫ˨�����Ч���Ͱ�ȫ�ԡ����������ϣ����D�o��ʹ���܉����ͨ�^�����J��Ѫ�ܷ�֧�������˂��y�o�B�ň��������ܵď����Ϳ��D���}�������ٶ���s50%���ϡ�
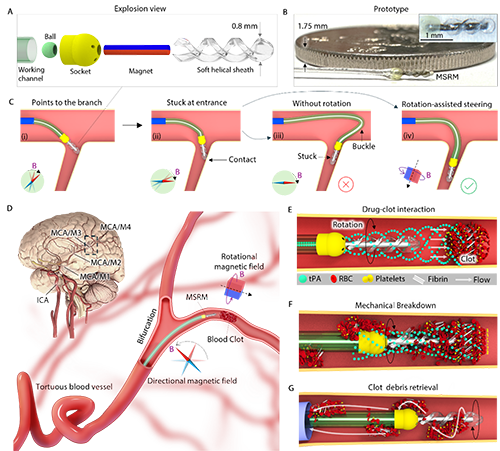
���D�o�������D������܉��@�����������ڏ��sѪ�ܭh���еČ������ܡ�ͨ�^ʩ�����D�ň��������܉���Чጷż�˽��|Ѫ�ܱڕr�a����Ħ�����������˂��y����ň������г�Ҋ�ļ�˿��D�����������e�ۼ����������Ȇ��}�����Y���@ʾ��ԓ�����܌����ܵĿ��_�������g�U�����50%���O��������˴�Խ�Mխ��֧�ͼ��D�������������⣬��1��1���XѪ��ģ���У����D�o���D������܉�����D��Ч��2�����ϡ��c���y���ք����D���ܻ����o�B�ň�����ȣ����D�o����������IJ������@�����ͣ��p����Ѫ�ܱړp���L�U���L���x��������Mһ����C��ԓ�����ܾS���������h��Ѫ�܅^��Ŀɲٿ��Ժ����D���������F�˽�300�����B�m���sѪ��·���Č������C�ϣ����D�o�������D�H���������ܵČ���Ч�ʺͿ��_������߀��Ч�����˲����y�Ⱥ��L�U�����R���������ί��еľ��ʌ����ṩ�ˏ������ļ��g֧��
�D2. �����D����Ե�ԭ���c�����C
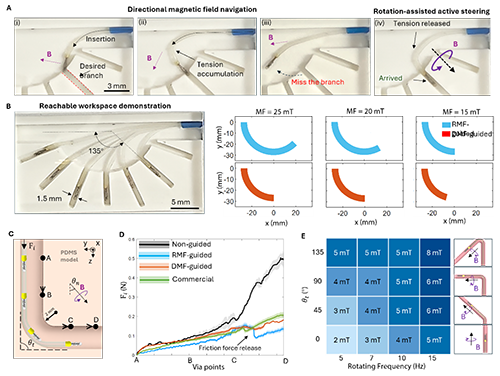
MSRM���t�������OӋ����߂�����£�ּ������Ѫ�ܽ����ί���Ч���c��ȫ�ԡ�ͨ�^�Y�����D�Cе�����c�ֲ�ˎ��ጷţ����F��Ч��Ѫ˨�ί�Ч�����w�⌍��@ʾ���Y����˨ˎ���͙Cе���õ��ί��ٶȱȆμ�ʹ����˨ˎ����s�������@�������ί�Ч�ʡ����⣬�CеĦ�����ʌ�Ѫ˨���Ч���������_���M�����Ҍ���ͬӲ�ȣ���ͬ�L�ȵ�Ѫ˨�����Ч�������F�����@�����������⣬ԓ�����܉���Ч������˨ˎ������@�����͂��y��˨�ί��ij�Ѫ�L�U���ί��^��ͨ�^�Y�ϙCе��ˎ���ֶΣ����H�����ˎ���ھֲ��ĝ�Ⱥ�����Ч�ʣ�߀�ӿ�������ٶȣ����F�����ڂ��y���ܶ�����˨��ϵ�y����ˎ�ă������ܡ�
�D3. MSRM �������^�����w�c�ί������OӋ�c����Y����
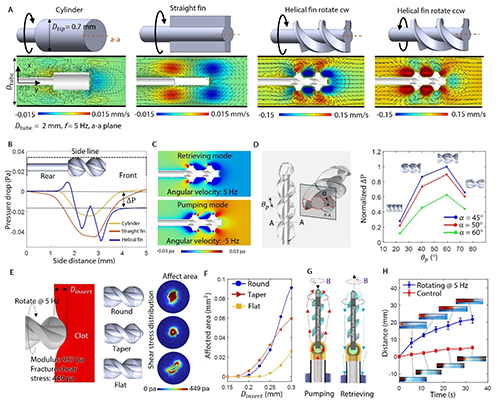
MSRM�Ŀ��_��������Ѫ˨̎��Ч���ڻ��w����ԇ��еĵ�����C������У����ܳɹ��������ùɄ��}���I���}�ď��sѪ��·�������F���_��λĿ�˅^�����D�o������ʹ�����^�̸�형����p�ٌ����w�����Ͳ����r�g�������˂��y�o�B�ň��µČ������Ͷ����F����Ѫ˨����^���У�������Ͼֲ��̈́�����˨��������5 Hz���D�ň�����15��犃Ȍ��FѪ˨��ȫ�ܽ⣬Ѫ��ǻ���֏�ͨ�����g��Ӱ��_�JѪ˨����ʧ���o���@Ѫ�ܪMխ����Ѫ˨��Ƭ�����wע��yԇ����CѪ�ܹ�ǻ�֏͡����w�ί��^���@ʾ����Ч�����١��o����Ѫ˨���Ч�������^���y�����@���s���ί��r�g�����Ͳ��l�Y�L�U�����⣬���܌������ί����؏������ã��@ʾ�������Ժ��R���D��������
�D4. ���w������OӋʾ��D����C�Y��
���Y���ԣ����������һ�N�߂�ܛ�|�����Dĩ�˵Ĵſ����ܣ�ּ������Ѫ�܃Ƚ�������_�����ί�Ч�ʡ�ԓ����ͨ�^���D�o�������D���@���������ڪMխ����Ѫ���еČ�������������C�������w���XѪ��ģ���ͻ��w�����б��F�������IJٿ��Ժ����������������Ƅ��ſ����t���C�����İlչ�c�R��������
�@��о��õ�����о��Y���֣�RGC������ۄ��¿Ƽ���ITC�����д���ʯ�C�����о������д�-�Ї��ƌWԺ�������M���g�о�Ժ�C�����c����ϵ�y�ό���ҡ���������аlƽ�_��InnoHK�����t���C���˄��¼��g���ģ�MRC����֧�֡�ԓ�����õ��¼�������������W������������Ї��ƌW���g��W�������ڵĴ��������͎�����
������Ĵ�W�Cе�c�Ԅӻ�ϵ��ʿ����ĭܴ��ʿ��Փ�ĵ�һ���ߣ����������W����������������������Ĵ�W�t�WԺ�ȿƼ�ˎ���ί��Wϵ�X�����������~ҫ���t����������Ĵ�W�t�WԺ�ȿƼ�ˎ���ί��Wϵ�������X�W���ڼ��X���������ۿ�������������Ĵ�W�Cе�c�Ԅӻ�ϵ����������Փ����ͬͨӍ���ߡ�
ԭ��朽ӣ�https://www.science.org/doi/10.1126/sciadv.adv1682
������������������n�}�M����ڴ��Ӽ�Ⱥ�C���ˡ�ܛ�w�C���˵��I���F�ˏĺ��ס����{�יC���˼��伯Ⱥ�О���о��c���ã����������ڿ��ϰl���˶�ƪ�W�gՓ�ġ������о��ɹ����£�
[1] Sci. Adv.11,eadt8213(2025).: Һ�B�w������Ĥ�C���ˣ����п��ГQ��ճ����푑������ڏ��s�����ؓ�Y���ϵ�����Ĥ���
https://www.science.org/doi/10.1126/sciadv.adt8213
[2] Nat. Commun. 15, 5197 (2024).: �۽������F�˟o����ܛ�w�C���˵��x�����Ӻ�ţ�D����ݔ��.
https://www.nature.com/articles/s41467-024-49148-6#citeas
[3] Sci. Robot.9,eadh1978(2024): ���ڼ���ɢ�ߌ��ȳ����Ⱥ�wۙ�c�������ڶ����f��
https://www.science.org/doi/10.1126/scirobotics.adh1978
[4] Sci. Adv.10,eadk8970(2024).tPA: ����C���˼�Ⱥ�ɿ������Ѫ˨���������L�ί���
https://www.science.org/doi/10.1126/sciadv.adk8970��
[5] Sci. Adv.9,eadf9278(2023): ����ˮ���z��Ⱥ�Ɍ��F���������ϣ����ڰ���˨���ί����}��.
https://www.science.org/doi/abs/10.1126/sciadv.adf9278��
[6] Sci. Adv.9,eadj0883(2023).: ģ�K�������C���˿Ɍ��F�ɿز���c�M�b��������đ���а����ί�.
https://www.science.org/doi/abs/10.1126/sciadv.adj0883��
[7] Nat Mach Intell4, 480�C493 (2022): ������ȌW���㷨��������Ⱥ���ڏ��s�h���Ќ��F���r�ֲ�Ҏ���c��������.
https://doi.org/10.1038/s42256-022-00482-8��
[8]Sci. Adv.8,eabq8573(2022): ���������C�����ڃȸQ�R�o���¿Ɍ��F���پ����f�ͣ����ڸ�����Ĥ��ڹ��еľ�Ĥ.
https://www.science.org/doi/abs/10.1126/sciadv.abq8573��
[9]Sci. Adv.8,eabn8932(2022): ���пɾ��̴Ż��ͼ��ɶ��ģ�K����ܛ�w�C���˿�������θ�c���а���ˎ���f��
https://www.science.org/doi/abs/10.1126/sciadv.abn8932��
[10]Sci. Robot.6,eabd2813(2021).: �ɼ�����C�����ڃȸQ�R�o���¿Ɍ��F�����L���x�f�ͣ������h�˪Mխǻ�w�Ȱ����ί�
https://www.science.org/doi/10.1126/scirobotics.abd2813��
������Ĵ�W�������ڈF���퓣�http://microbot.mae.cuhk.edu.hk/
- �eϦ���၆��W�����F� Adv. Mater.: �аl��ģʽ����׃ɫҺ�������w�� 2025-06-16
- ��h�������tɏ��Ϳ��/�Aɽ�tԺ����� AFM���g���ޏ��ߵĸ��� - һ�N�˹��g���Ƃ���·��� 2024-10-14
- �A�ƴ��������ڡ���ȫ�����ڈF� Nat. Commun.���ʹſ��z�ҙC���ˌ��F��ģ�B푑��c��ܼ��� 2024-03-12
- ����w��/�����t�n�}�M Addit. Manuf.���ň��o������������������ 2024-02-06
