磁控柔性執行器具有無線操控、快速相應的優勢特點,在近年來收到廣泛關注。磁性柔性致動器通常由柔性材料基體和嵌入其中的磁性顆粒組成。當磁性顆粒為硬磁性顆粒時,由于其能保持其剩磁強度,在驅動磁場下能夠產生磁矩驅動致動器形成內部變形。這類執行器的功能多樣性取決于其空間結構與磁化排布設計,與制造方法緊密相關。增材制造方法為磁性驅動器的制造提供了全新的思路,通過與輔助磁場的結合,實現在制造過程中對材料的磁化方向進行排布,進而實現對材料內部的磁排布設計。但現有研究中大多未能實現同時具有三維空間結構與磁排布的柔性執行器。另外,基于光固化的增材制造方法對材料透光性有要求,材料的磁含量受限,會引起磁致形變的不足。這些問題限制了磁性柔性執行器的設計創新與功能拓展。

針對上述問題,浙江大學趙朋教授/張承謙博士課題組報道了一種磁場輔助DLP光固化制造方法,用于制造具有三維結構和三維磁排布的磁控柔性執行器。在制造過程中,輔助磁場可使硬磁性顆粒對齊,從而獲得各向異性磁化排布。DLP方法具有制造精細結構和選擇性固化的能力,使構造復雜磁排布設計成為可能。為了解決磁粉含量低導致驅動力不足的問題,該研究發揮該制造方法的多層打印能力,構建了凹槽結構,以增強執行器的變形能力,并展示了具有抓取、爬行、泵水等功能的磁性柔性制動器,體現了該方法在磁控柔性執行器的設計與功能拓展方面的巨大潛力。相關研究成果以“Magnetic Field-Assisted Manufacturing of Groove-Structured Flexible Actuators with Enhanced Performance”為題發表在《Additive Manufacturing》上,浙江大學機械工程學院趙朋教授和交叉力學中心張承謙博士為論文共同通訊作者,碩士生孫浩南為論文第一作者,論文作者團隊成員均來自浙江大學流體動力基礎件與機電系統全國重點實驗室。

圖1 磁場輔助制造裝置與制造流程示意圖
因為DLP方法是基于光固化原理,對材料有透光性要求,磁顆粒含量只能保持在較低的水平,這會導致磁驅動效果變差,影響磁控驅動器的功能實現。為應對這一問題,該研究通過構造凹槽結構以強化形變效果。充分發揮制造方法的多層打印能力,在磁排布區域的中心部分進行疊層,在不同磁排布區域的交界處保留較小的厚度,將形變集中在需要形變的地方。
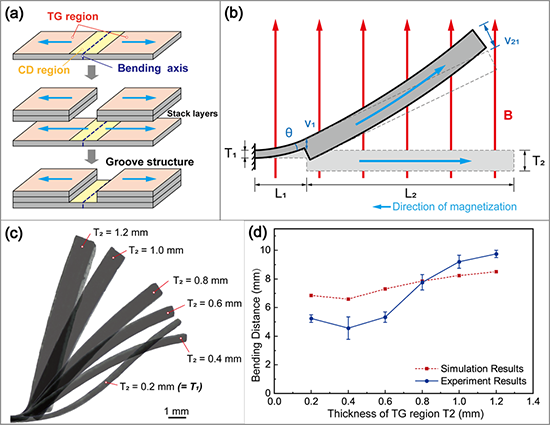
圖2 凹槽結構的構造以及對形變的影響

圖3 多臂抓手以及運輸物體應用展示

圖4 凹槽結構組成的二自由度關節強化爬行機器人的運動能力

圖5 磁性微流隔膜泵
原文鏈接:https://doi.org/10.1016/j.addma.2024.103979
課題組主頁:https://person.zju.edu.cn/pengzhao
- 同濟大學/喀什大學馬杰教授團隊 Small:原位磁場輔助雙網絡凝膠高選擇性回收貴金屬 2024-09-03
- 浙江大學鄭強、吳子良團隊 Angew:旋轉磁場輔助制備具有多響應性、復雜取向結構的納米復合水凝膠 2022-06-27
- 中科院福建物構所官輪輝研究員團隊 CEJ:DLP光固化打印具有高導電、機械強度和自愈合的離子彈性體 2022-11-17
- 武漢理工戴紅蓮、涂溶/華山醫院陳天午 AFM:韌帶修復者的福音 - 一種人工韌帶制備的新方法 2024-10-14
- 華科大李亮教授、曹全梁教授團隊 Nat. Commun.:微型磁控膠囊機器人實現多模態響應與多功能集成 2024-03-12
- 瞿金平院士華科大團隊牛冉研究員《Small》:基于離子交換的可重構、磁控雙功能集群 2024-01-26
- 臥龍崗大學蔣臻博士/ Geoffrey Spinks教授 AM:兼具抗撕裂能力、類似皮膚低模量、低溫驅動的高性能柔性執行器 2024-05-02
