導電凝膠在人機交互(HMI)器件中展現出應用潛力,但其脆性、溶劑依賴性等缺陷長期制約實際應用。本研究通過設計一種無溶劑拉伸取向雙網絡深共晶凝膠突破上述局限。分子鏈纏結與拉伸誘導取向的協同效應顯著提升材料力學力(133.86 MJ/m3)。取向微結構在形變中維持導電通路完整性,賦予材料多模態高靈敏度傳感特性(250%應變下靈敏系數GF=1.4;溫度響應系數TCR=14.7% oC-1)及穩定性(>300次循環無信號突變)。通過溶液印刷和UV固化,應用于功能性HMI器件:體感手套(關節運動識別延遲≤17 ms)、電容傳感陣列(響應延遲≤34 ms)及高分辨率溫度傳感器。
近期,澳門大學應用物理及材料工程研究院孫國星團隊創新性地提出“拉伸誘導取向增強”策略,通過分子層面的協同作用機制,成功開發出力誘導排列雙網絡深共晶凝膠。采用預溶解策略將超高分子量聚丙烯酰胺引入丙烯酸/氯化膽堿深共晶體系,形成穩定的雙網絡結構,材料展現出30.7 MPa的拉伸強度(703%斷裂伸長率)和133.86 MJ/m3的韌性,較對比樣提升6.2倍(圖1c-d)。壓縮測試顯示98%形變后仍能恢復96%原始尺寸,邊緣缺口試樣斷裂應力達5.85 MPa,較對比樣品提升4.3倍。通過偏振光照片分析裂紋及應力分布(圖2e-f)顯示顯著差異:0%M1000樣品在裂紋尖端形成局部沙漏狀應力集中區,而3%M1000樣品呈現全域擴散型應力分布。結合有限元分析對比樣的von Mises應力呈沙漏分布(尖端峰值26 MPa),而3%M1000樣品von Mises應力表現為層狀擴散,(尖端峰值62 MPa,較對比樣提升2.4倍)。通過偏振光照片和有限元分析揭示其增強機制:超長PAM鏈在拉伸時形成取向排列,將裂紋尖端的局部應力傳遞至整個網絡(圖2h)。動態氫鍵網絡通過可逆斷裂耗散能量,同時PAM纏結網絡阻礙裂紋擴展。這種“整體纏繞增韌+長程取向強化+短程動態耗能”的協同作用,突破了傳統材料強度與延展性的此消彼長規律。
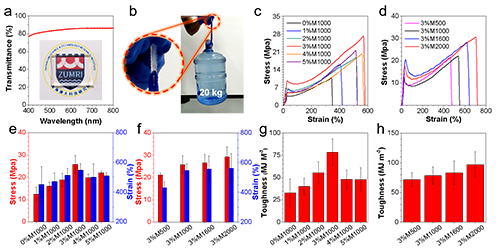
圖1. a)雙網絡深共晶凝膠透光率。b)提拉20 kg重物照片。c)不同PAM含量的雙網絡深共晶凝膠應力-應變曲線。d)不同分子量PAM的雙網絡深共晶凝膠應力-應變曲線。e)和 f)樣品平均應力與應變值。g)和 h)樣品韌性值。
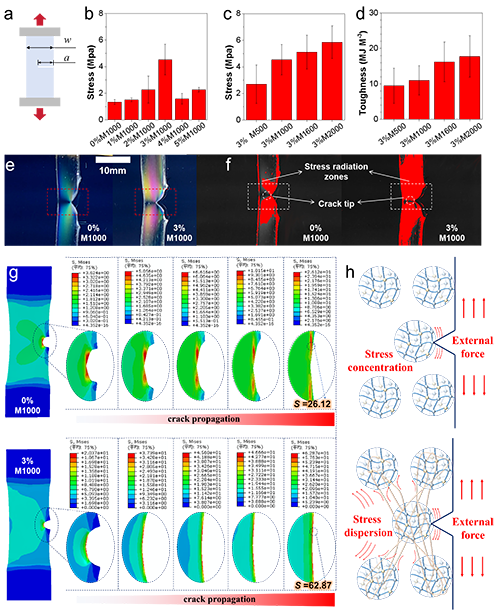
圖2. a)邊緣缺口試樣拉伸實驗示意圖。不同PAM含量缺口試樣的拉伸應力曲線(b)、(c)。d)膠韌性值對比。e)偏振光照片。f)偏振光強度分布圖。g)有限元模擬。h)外力作用下的微觀結構模型。
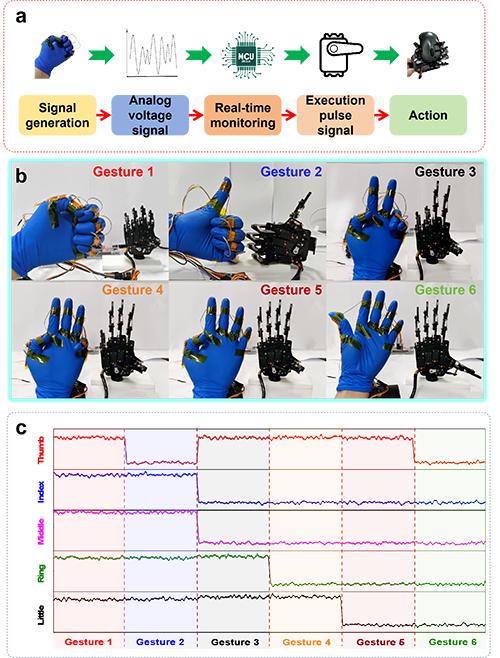
圖3.體感手套 實時控制的仿生機械手。a)信號–執行示意圖。b)實物圖,c)模擬電壓信號曲線圖。
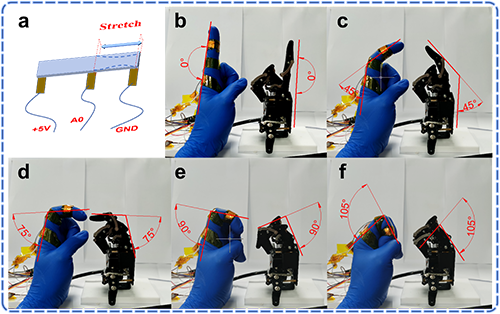
圖4. a)接線圖。體感手套精確調控機械手指關節彎曲角度,關節彎曲角度分別為:b)0°、c)45°、d)75°、e)90°及f)105°。
單軸拉伸測試顯示:相對電阻變化(ΔR/R0)隨應變呈線性增長(GF=1.4,R2=0.9955)。材料的液態和UV固化性,使之加工方式多樣且簡易,制備了:(1)體感手套,用于實時人體運動捕捉與仿生手控制,其工作流程如圖3a所示:手指彎曲引發傳感器的應變-電阻變化,產生連續模擬電壓信號,經芯片處理后驅動機械手的步進電機,響應速度≤17 ms。圖4b–f展示了連續單關節運動追蹤功能:模擬電壓輸出與關節角度(45°、75°、90°、105°)呈線性關聯且軌跡偏差微小。對比現有技術:a)摩擦納米發電機(TENG):雖可實現自供電傳感,但其脈沖式輸出限制其連續運動控制;b)熱電傳感器:依賴關節溫度梯度,存在響應遲滯與空間分辨率低等缺陷。(2)4×4電容陣列傳感器(圖5),通過浸漬或印刷工藝可制備電容式傳感器,與壓力依賴型電阻陣列不同,該設計基于電容調制原理,可同時實現接觸與接近傳感,可多點觸控檢測,位置追蹤,響應快≤34 ms。(3)柔性透明溫度傳感器(圖6),其調控機制源于三方面協同作用:a)聚合物鏈段動力學(溫度激活的鏈運動性調控離子通道可及性);b)溫度依賴的非共價鍵斷裂/重組調節離子通道密度;c)熱激活離子傳輸(離子熱運動)。在低溫區(-24–9.4 oC)表現出優秀的溫度傳感性能(TCR = 14.7% °C-1)。
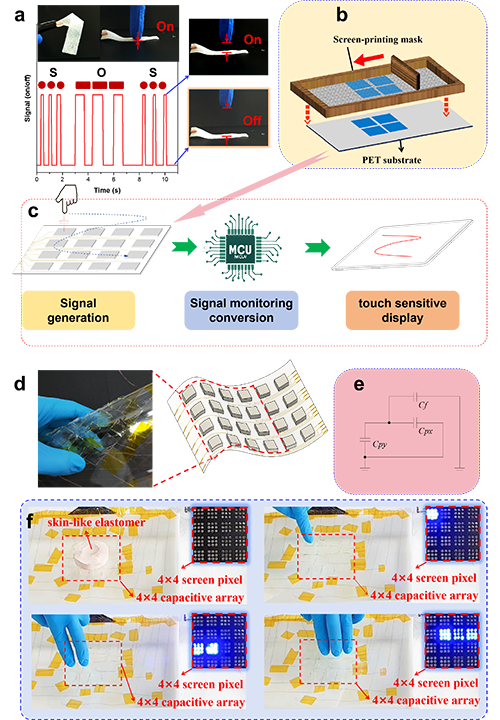
圖5. 電容式傳感器陣列,a)基于電容信號編碼“SOS”的摩爾斯電碼實現示意圖。b)印刷法制備柔性傳感器陣列。c)電容觸控屏信號-執行流程圖。d)電容傳感器陣列實物圖與結構示意圖。e)電容觸控電路原理圖。f)檢測觸控輸入的電容式觸控傳感器陣列工作實拍圖。
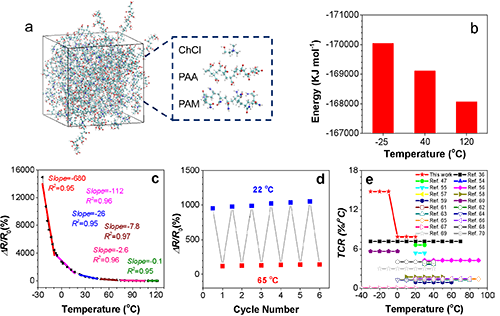
圖6. a)分子動力學模擬構型。b)不同溫度下的非共價鍵結合能。c)ΔR/R0溫度響應曲線。d)ΔR/R0熱冷循環變化曲線。e)本工作與已報道溫度傳感器的溫度響應系數(TCR)對比。
結論
該研究開發了一種無溶劑雙網絡深共晶凝膠,通過“整體纏繞增韌+長程取向強化+短程動態耗能”的協同作用,突破了傳統材料強度與延展性的此消彼長規律。基于此雙網絡深共晶凝膠平臺,構建多模態傳感器,為人機界面及智能軟體機器人材料提供了不同的思路。
原文鏈接:https://doi.org/10.1002/adfm.202508233
- 東華大學朱美芳教授課題組:異相成核與拉伸取向協同誘導熔紡生物基PHBV纖維的晶體結構轉變 2017-07-17
- 北化馬志勇課題組 Macromolecules:雙螺力敏色團ABPX在單/雙網絡彈性體中的力致變色與光致變色機理差異 2025-06-12
- 北理工陳煜/積水潭醫院李波 CEJ: 仿蝸牛粘液強粘附水凝膠髓內釘止血涂層 2025-02-05
- 長安大學顏錄科、西工程大張鵬飛 JMCA:自修復、抗變形MXene雙網絡水凝膠用于穩定太陽能驅動界面蒸發 2025-01-27
- 四川大學冉蓉、崔為 Adv. Mater.:基于本體共聚實現無溶劑制備強韌物理水凝膠 2025-06-23
- 華南師大蘭亞乾/陳宜法團隊 Nat. Commun.:一種可加工的類蜘蛛網粘合劑 2025-05-28
- 華科大龔江課題組 ACB:在常壓空氣氛圍、無溶劑條件下ZnO催化廢棄PET連續降解 2025-05-18
