ճ������V����������Ȼ���Լ��������У��������S��涼������Ҫ�����á�����ճ���ĸ�֪�����ָ���һ���Ҫ������ͨ��ͨ�^���|Ŀ�˱������S���Ƥ�w��Ӂ팍�F��ʹ���҂����Ա������cճ����������w�����r�a���^��𤸽��Ó�xʧ���Ć��}�����C����ץȡ���ܵĿ��ٰlչ��ʹ�����܉�����c��N���w�Ľ�����Ȼ�������挦����𤸽��������w�r������M�о��_�ı���ճ����֪�����ܰ�ȫ����ɽ����΄գ���Ȼ��һ������
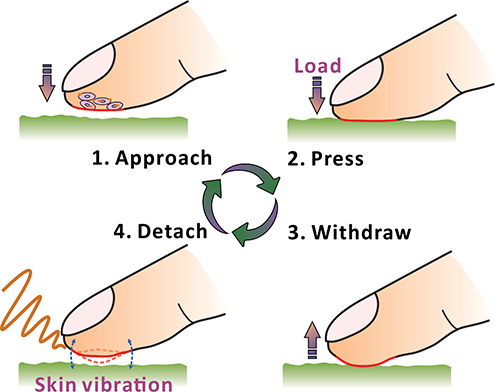
�D1. ���ָ��Ƥ�w��ճ�������^��

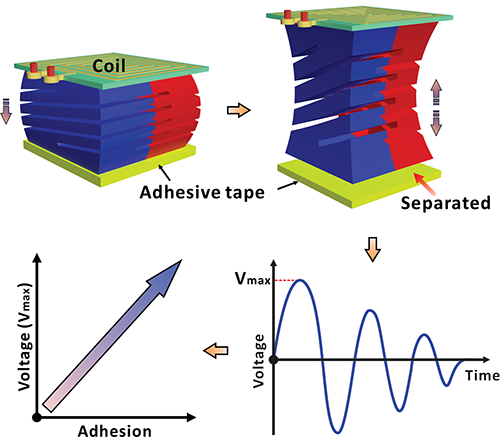
�D2. �����S�Ż����ɵ�������������չʾ
���b�ڴˣ����T��W�ܱ����о��F�ͨ�^ģ�M���ָ��Ƥ�w�����s-����-�؏�����ճ�������^�̣��D1�����OӋ����һ�N�����S�s�����������������S���ԴŻ����ɣ��D2����ͨ�^��ȡ�؏��r�a����늉���ֵ�Ԍ��F������𤸽����С�ęz�y���о��l�F�������S���ԴŻ����ɱ��������z������Ȼ���ջص��^���У��D3���������L�����S���ԴŻ����ɕ��ڻ؏����^���Юa���ň�������������׃��������늴ŸБ����ɣ��@�N���ٵ�׃���������Ż�����픲��Č�늾�Ȧ��֪����ݔ�������ĸБ�늉���̖��ͨ�^��늉���ֵ�c���ԴŻ���������������������t���Ԍ��F������ճ������С�ľ��_���У��D4��������늉��ķ�ֵ��С�c���S���ԴŻ����ɵ����L�����P���о��ˆTͨ�^��׃���S�Ż����ɵĄ��ȣ��и������ʼģ���ȣ������F�ˌ�ճ�������з����������`���ȵ������{�أ��D5�������m����ͬ���H���õ������Y��������ԓ���S���ԴŻ������ڶ�N�l���£������Ԍ��F������ճ������С�ľ��_��֪���о��ˆT��ͨ�^�OӋ�����đ��ó�ʽ��չʾ��ԓ���S���ԴŻ����ɿ��Լ��ɵ��˵���ָ��C���˵��ֱ��У����F����ճ����֪�Ĺ��ܡ�
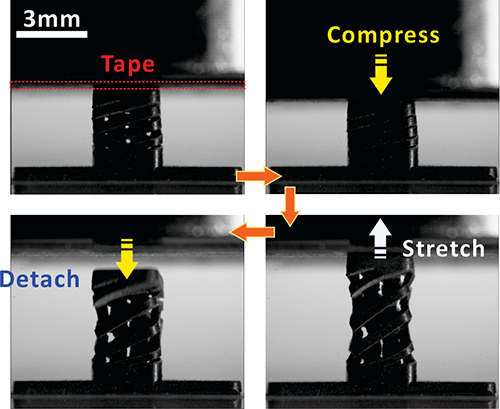
�D3.���S���ԏ����c�z�����|-���x���^��
�D4. �����S���ԴŻ����ɵĂ���ԭ��
���w���ԣ�ԓ�о�ͨ�^һ�N�µ��Ƃ䷽���_�l����������S���ԏ��ɽY������ģ�M���ָ��������s-����-�؏����ӑB�^�̣����F������ճ���ĸ�֪��������ԓ����ϵ�y���о��˸��N�P�I���،��Ż����ɂ���������Ӱ푣�չʾ�����ڴ���ʽ��֪�đ���ǰ���������������Mһ��������ͨ�^�c�����|�X�������OӋ��Y�ϣ���̽��δ�����ܙC���˵ķ����Б������ṩ��ȫ����ƽ�_��
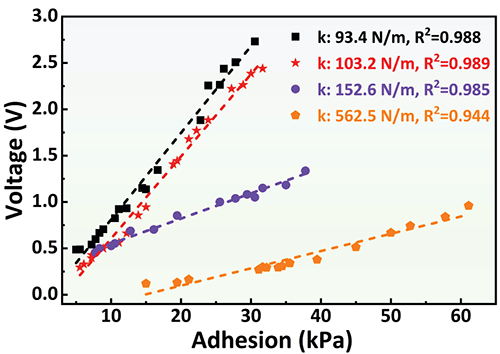
�D5. ���Ȍ��������`���Ⱥ͂��з�����Ӱ�
���P��������Bionic Perception of Surface Adhesion via a Magnetized Spring-Like Sensor with Axial Stretchability�����}�l����ACS Nano�����µ�ͨӍ���ߞ��ܱ��㸱���������T��W�������������Ϲ����о�Ժ��ʿ�����h�ܞ��һ���ߡ�ԓ��о��õ����T�e�����^�ƌW���g�lչ���𡢏V�|ʡ�ƌW���g�d�����T��W��֧�֣��Լ����ش�W�_���x���ںͰ��T��W��ط�����ڵĴ��������c������
ԭ��朽ӣ�https://pubs.acs.org/doi/full/10.1021/acsnano.5c07356
