��ǰ�˹����ܿ��ٰlչ�����N��˹������ܙC���ˌӳ����F���|�X��֪�����δ�����ܙC��̽����������Ļ��A�Թ���֮һ���lչ�����|�X���ܵķ������Ƥ�w���Ը�֪�����������F�����c��ܛ�M���g�ęCеƥ���Ծ�����Ҫ�ĿƌW���x�͑��Ãrֵ��
��ָ�y�܉��֪���w����y���Ć��l���Ї��ƌWԺ�K�ݼ{�������E�о��T�F���ǰ���о����A�ϣ�Nano Research 2017, 10(8): 2683-2691�������Ã����߽����������Y�������Ա�Ĥ�r���α�̼�{�܌�늱�Ĥ���OӋ�c�Ƃ��˾��Ќ��z�y������45-2500 Pa�������`���ȣ�3.26 kPa-1���įB�ӽY��������ӂ�������-���D1b��������������Ħ�����w����r����l���c���w����y���ֲڶȵ�ģ�ͣ�f = v/�ˣ��D1��v�����Ԃ����������ٶ��\�ӣ�f������l�ʣ��ˣ�����g�༴���L����ԓ���Է���ָ�y�������ɑ��������w���澫���y��/�ֲڶȵľ��_��e����Ϳəz�y15 ��m×15 ��m�ļy·�����^��ָָ�y�ı��R������~50 ��m×50 ��m����Ҳ�܉F���Б�������ä����ĸ�ȸ��`���z�y�c�R�e���@Щ���Ԍ��ڙC�������Ƥ�w���|�X��֪�����ܙCе�ֵȷ�������Ҫ���ڑ��á����P�Y���Ѱl����Small (2018, 1703902, 1-9; DOI: 10.1002/smll.201703902)������Advanced Science News�ԡ�A New Bionic Skin; Makes Sense������}������D2����Փ�ĵ�һ�����ǴTʿ�о�������|�����F��ʿ��
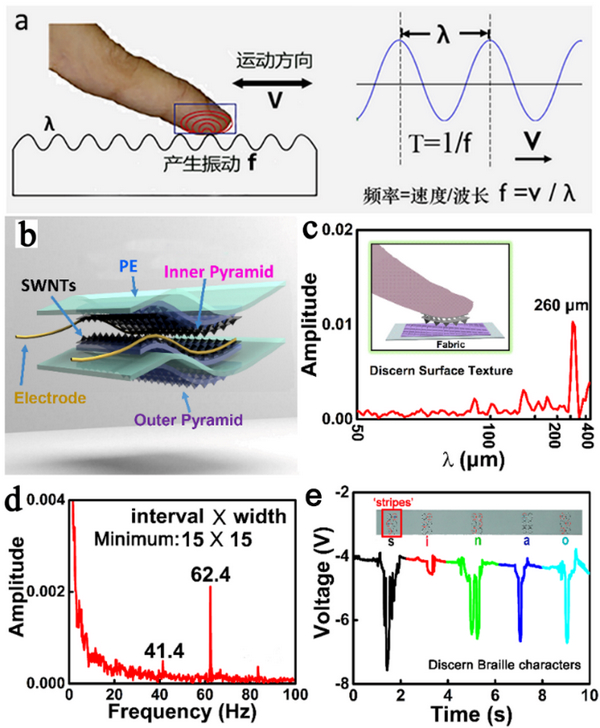
�D1. ��a����ָ�ֲڶ��|�X��֪����ģ�ͣ���b���B�ӽY������ָ�y������ģ�ͣ���c�����Ԃ��������F����ָָ�y����y��푑����䣨d����С�ֲڶȸ�֪�c��e����ä����ĸ��֪��

�D2 Advanced Science News������ָ�y���Ԃ��������
�������Կɴ�����ӣ������c��ܛ�M���g�ęCе��ƥ����ԓ�I����Ҫ��Q���P�I�ƌW���}֮һ��ᘌ������P�I�ƌW���}�����ڏ��E�о��T�Fꠈ����һ�N�����ް����ʽY�����w�S���չ���ԑ�׃��������ԓ��������ȫ�����������и��`���ȣ��ȿ��Ԍ�����׃�ֿ��Ԍ���׃�����õ�푑�������ģ��,
 ��
�� ,
,  ����H:�ް������h���ʌӺ�ȣ�epre���w�S���A��׃��ec���w�S�˲��Ϯa���ް����R�瑪׃��l���ް����L��hs���ʌӆΌӱ�Ĥ�ĺ�ȣ�n���ʌӱ�Ĥ�Ӕ�����ͨ�^�A����-����-ጷŲ��Կɿص������ް��Y�����@Щ�ް�����|�������~��Ľ��|���ͨ·���D3����ԓ���ͨ·����������������^�������ް����_���l�����@��׃������֮�ʌӞ錦��׃���е�MWCNT/TPE�ͺϱ�Ĥ�����ԓ��׃�������ژO��đ�׃�����ȣ�> 1135%�������и��`���ȣ�GF: 21.3, 0%-150%; 34.22, 200%-1135%�����@Щ�����������x���˳���չ��׃��������С�����\���Լ������P���\�ӌ��r�O�y��������ͬ�rҲ�ɑ�����ֲ���t���������ڔ��ֻ��u�����쿵�ͣ��D4����ԓ�о��ɹ����ڰl����Advanced Science ��DOI: 10.1002/advs.201800558�������µ�һ�����Dz�ʿ�о������B�x��
����H:�ް������h���ʌӺ�ȣ�epre���w�S���A��׃��ec���w�S�˲��Ϯa���ް����R�瑪׃��l���ް����L��hs���ʌӆΌӱ�Ĥ�ĺ�ȣ�n���ʌӱ�Ĥ�Ӕ�����ͨ�^�A����-����-ጷŲ��Կɿص������ް��Y�����@Щ�ް�����|�������~��Ľ��|���ͨ·���D3����ԓ���ͨ·����������������^�������ް����_���l�����@��׃������֮�ʌӞ錦��׃���е�MWCNT/TPE�ͺϱ�Ĥ�����ԓ��׃�������ژO��đ�׃�����ȣ�> 1135%�������и��`���ȣ�GF: 21.3, 0%-150%; 34.22, 200%-1135%�����@Щ�����������x���˳���չ��׃��������С�����\���Լ������P���\�ӌ��r�O�y��������ͬ�rҲ�ɑ�����ֲ���t���������ڔ��ֻ��u�����쿵�ͣ��D4����ԓ�о��ɹ����ڰl����Advanced Science ��DOI: 10.1002/advs.201800558�������µ�һ�����Dz�ʿ�о������B�x��

�D3. ��a���w�S���չ��׃���������Ƃ�����ʾ��D����b�����������W��Ƭ����c����ͬ�A����l���µõ������đ�׃���׃����������d����ͬ�A����l���µõ������ı�����ò����e����׃�����������^���еı�����ò��

�D4. ��a�����w�S����չ��׃�������������֭h���ֱ�����ͬ�����M�Ќ��r�O�y�����׃����������b���w�S����չ��׃�������O�y�퇵�����׃����������c���w�S��׃�����������ڴ������ϵĹ�W��Ƭ����d�������Ȳ���ͬ������ʾ��D����e�������������Ȳ�������푑���
���������õ��ˇ�����Ȼ�ƌW����61574163�������Kʡ�ܳ��������BK20170008�����Ї��������2017M611945����֧�֡�
- �Ϸ��Ƽ���W�����w���ڈF� Matter�����Ԃ�����������ͻ�� - �������x���gճ���c���`����֪ 2025-07-01
- ���|��W������ Small���C���W���o���ı�����Ԅ������Ϳ���Ûˮ���z���Ԃ���������ˮ���ք��R�e 2025-05-26
- ����������W���겨���� AFM��Ƥ�w���|�ӆ��l�ı������������x��ˮ���z�����������Ԃ����� 2025-04-14
- �A���r������p���ڡ�����x�����ڡ��콭�������� Adv. Sci.���p�W�j�x��ˮ���z���F�ɴ����������늴������c�Թ�늂���һ�w�� 2025-07-03
- �A��������ِ�A�����n�}�M CEJ������3D��ӡ���g�����Ŀɴ��������|�XĦ��늂������ڲ��ϸ�֪�I��đ��� 2025-05-29
- ���ڼ��g��Wʷ���|�� Carbon������ʯīϩ-�{���w�S�؏ͺϱ�Ĥ�����ޏ͑�׃/����pģ���������OӋ���ڿɴ��������O�y�đ��� 2025-05-28
