���ڣ��Ϸ��Ƽ���W(xu��)���W(xu��)�c���պ��칤��ϵ��N�x�F(tu��n)�(du��)�c�C(j��)е�c��Դ����ϵ��蟈F(tu��n)�(du��)����������ȻͨӍ��(Nature Communications) �ϰl(f��)���}�顰Polyelectrolyte elastomer-based ionotronic sensors with multi-mode sensing capabilities via multi-material 3D printing����Փ�ģ���(b��o)����ͨ�^(gu��)����ϔ�(sh��)�ֹ�̻�3D��ӡ���g(sh��)һ�w���O(sh��)Ӌ(j��)������ھ�늽��|(zh��)�����w�Ķ�ģʽ�����x����݂�������ԓ�о���Q�˂��y(t��ng)�x늂�������(w��n)���Բ�����Ԇ�һ�Ć�(w��n)�}����������x늂��������O(sh��)Ӌ(j��)�������c��(y��ng)���ṩ���µĽ�Q������

�D1 Ƥ�w���l(f��)����ģʽ�����x늂����� (a) ���wƤ�w��(n��i)��N��������ʾ��D (b) ���wƤ�w���Ը�֪��һ�����W(xu��)��̖(h��o)�牺����������+������+Ť (b) ���ڶ���ϔ�(sh��)�ֹ�̻�3D��ӡ���g(sh��)�Ƃ������ģʽ�����������x늂�����
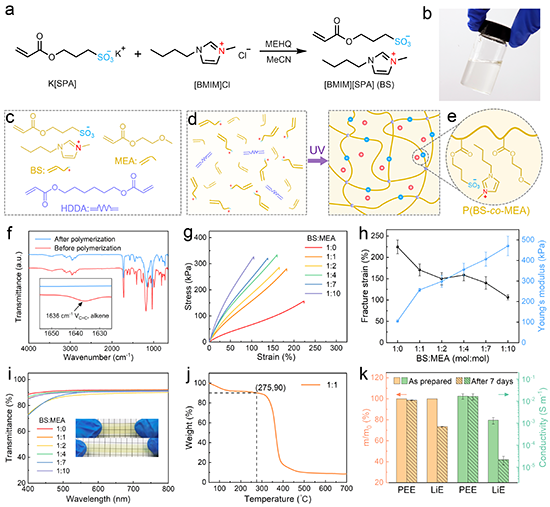
�D2 ��늽��|(zh��)�����w���O(sh��)Ӌ(j��)���Ƃ��c��W(xu��)�����W(xu��)��늌W(xu��)�����Լ��ᡢ�܄���(w��n)����
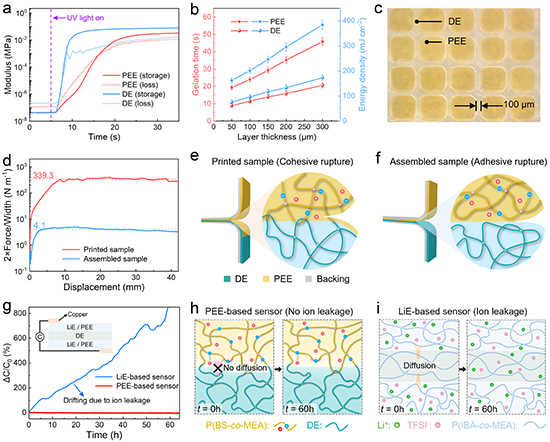
�D3 �x늂������Ŀɴ�ӡ���c���� (a) PEE�惦(ch��)ģ���͓p��ģ���S��̻��r(sh��)�g��׃������ (b) �̻��r(sh��)�g�c�����ܶ��S�Ӻ��׃���P(gu��n)ϵ (c) ��ӡ��PEE���չʾ (d) 3D��ӡ���ք�(d��ng)�M�b��PEE/DE�p�ӽY(ji��)��(g��u)��180��x���� (e) 3D��ӡ��PEE/DE�p�ӽY(ji��)��(g��u)���w����ʾ��D (f) �ք�(d��ng)�M�b��PEE/DE�p�ӽY(ji��)��(g��u)�������ʾ��D (g) ����PEE�ͻ���LiTFSI���s�x�ӏ����w�����ʽ����������C/C0�S�r(sh��)�g׃������ (h) ����PEE�����ʽ�������o(w��)�x��й© (i) ����LiTFSI���s�x�ӏ����w�����ʽ�������x��й©ʾ��D
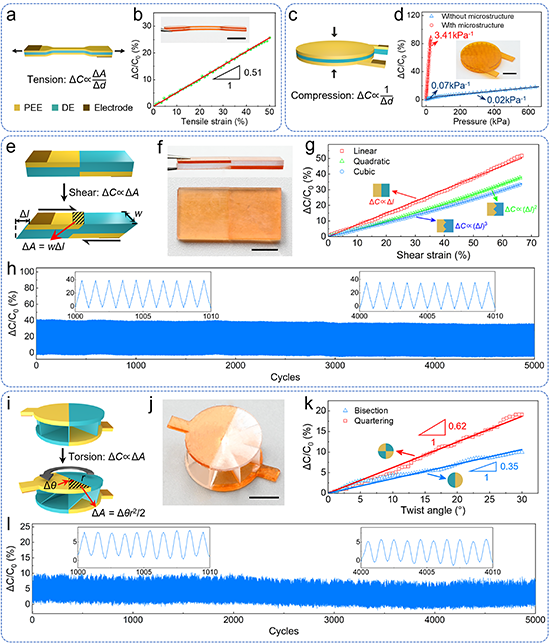
�D4 ���졢���s�����С�Ť�D(zhu��n)�x늂����� (a) ���������ԭ��ʾ��D (b) ���-���쑪(y��ng)׃���� (c) ���s������ԭ��ʾ��D (d) ��/�o(w��)�Y(ji��)��(g��u)�ĉ��������������-�������� (e) ���Ђ�����ԭ��ʾ��D (f) һ�N���Ђ�������(sh��)��D (g) ��ͬ�`���ȵļ��Ђ����������-���Б�(y��ng)׃���� (h) ���Ђ�������ƣ�ڜy(c��)ԇ���� (i) Ť�D(zhu��n)������ԭ��ʾ��D (j) һ�NŤ�D(zhu��n)��������(sh��)��D (k) ��ͬ�`���ȵ�Ť�D(zhu��n)�����������-Ť�D(zhu��n)������ (l) Ť�D(zhu��n)��������ƣ�ڜy(c��)ԇ����

�D5 �M��ʽ�x늂����� (a) �����M�ς�����ʾ��D (b) ������(sh��)��D (c) �����M�ς�������Ч�·�D (d) ��һ����ģʽ�µ�������̖(h��o) (e) ���s����(l��)�µ����-Ȧ��(sh��)׃������ (f) ���켤��(l��)�µ����-Ȧ��(sh��)׃������ (g) �����M��׃���µ���̖(h��o)�V (h) �����M�ς�����ʾ��D (i) ������(sh��)��D (j) �����M�ς�������Ч�·�D (k) ��һ����ģʽ�µ�������̖(h��o) (l) ��Ť�M�ς�����ʾ��D (m) ������(sh��)��D (n) ��Ť�M�ς�������Ч�·�D (o) ��һ����ģʽ�µ�������̖(h��o)
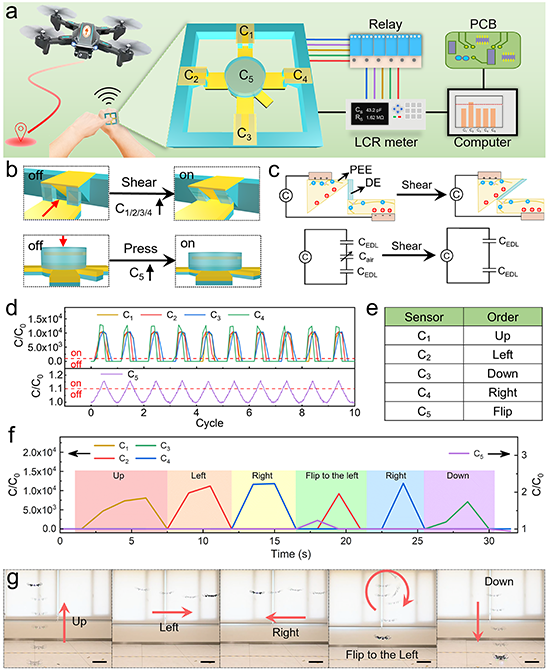
�D6 �M��ʽ�x늂��������ڟo(w��)�˙C(j��)���h(yu��n)�̟o(w��)���ٿ� (a) �o(w��)�˙C(j��)����ϵ�y(t��ng)ʾ��D (b) �M��ʽ�x늂������м��Ђ���ģ�K����ģʽʾ��D (c) ���Ђ���ģ�K����ԭ�� (d) �������傀(g��)ͨ�������̖(h��o)�y(c��)ԇ (e) ָ��g߉ (f) �M��ʽ�x늂�������(sh��)�r(sh��)�����̖(h��o) (f) ��ͬ�r(sh��)�̵ğo(w��)�˙C(j��)�w�Р�B(t��i)
����о��ˆTչʾ��һ��(g��)���Ă�(g��)���Ђ�������һ��(g��)���s�������M�ɵĿɴ����b�؆�Ԫ���������B�ӵ�һ��(g��)�h(yu��n)�̿���ϵ�y(t��ng)�������h(yu��n)�̟o(w��)�����Ɵo(w��)�˙C(j��)���w�У���D6��ʾ���@��(g��)�ɴ����b�؆�Ԫ�е��Ă�(g��)���Ђ�����ؓ(f��)؟(z��)��֪�ֲ�����ָ�\(y��n)��(d��ng)�����ڿ��Ɵo(w��)�˙C(j��)�ķ������s�������t���ڸ�֪��ָ�ĉ��������Ɵo(w��)�˙C(j��)�����L���@�N�ɴ����b�؆�Ԫ���O(sh��)Ӌ(j��)���Ԍ�(sh��)�F(xi��n)�˙C(j��)�������ṩ�����`��Ŀ��Ʒ�ʽ��
�Ϸ��Ƽ���W(xu��)���W(xu��)�c���պ��칤��ϵ����������ؔ(c��i)���F(xi��n)����ۿƼ���W(xu��)���V�ݣ���ʿ�������C(j��)е�c��Դ����ϵ��ʿ���̽��������W(xu��)�c���պ��칤��ϵ��ʿ�������S��Փ�Ĺ�ͬ��һ���ߣ��������߰����C(j��)е�c��Դ����ϵ��ʿ������骺����W(xu��)�c���պ��칤��ϵ�����������������F(xi��n)���m�ݴ�W(xu��)��ʿ�������Ϸ��Ƽ���W(xu��)���W(xu��)���պ���ϵ����������N�x�c�C(j��)е�c��Դ����ϵ�����������Փ�Ĺ�ͬͨӍ���ߣ��Ϸ��Ƽ���W(xu��)��Փ��Ψһ��λ��
Փ��朽ӣ�https://www.nature.com/articles/s41467-023-40583-5
�\(ch��ng)���P(gu��n)ע�߷��ӿƼ�

- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ��(gu��)�HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ��(gu��)�a(ch��n)������٣����(gu��)���^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј�(ch��ng)��300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �������S���e���ڈF(tu��n)�(du��) Angew...
- ���ϴ�W(xu��)����/�S�M(j��n)�F(tu��n)�(du��) AFM:...
- ���T(m��n)��W(xu��)�������n�}�M Sci. ...
- �A���r(n��ng)�������/����...
- ��h�������l(w��i)�ֽ��ڡ���P��...
- ��ʿ�m��W(xu��)�������F(tu��n)�(du��) Adv. ...
- ��h��W(xu��)�������ڈF(tu��n)�(du��)��Adv....
- ��������Rͬ�c���ڈF(tu��n)�(du��)��Sc...
- �Ϲ����غ������đ�Ƽ/�п�...
- ���T(m��n)��W(xu��)�ܱ���F(tu��n)�(du��) ACS Nan...
- �V����W(xu��)���P���ڈF(tu��n)�(du��) CEJ...