����Ȼ��ܛ�C���˵İl(f��)չ�ṩ�˴����`�С��S�������������^��ˮĸ���|�ֺͺ��߲ݵ��~�ӣ����H�����ڴ���(n��i)�`����׃�����Ҿ������Ҹ�֪����������ģ�M�@Щ��Ȼϵ�y(t��ng)���о��ˆTͨ�^�Y(ji��)��ܛ���������Ԃ��������_�l(f��)����ܛ�C���ˡ�Ȼ����һ���ձ�������Ǵ����(sh��)ܛ�����mȻ�܉��γɏ��s���Π��ȱ����֪�ⲿ�̼��ͱO(ji��n)�y�����\�ӵ���������ֱ��Ƕ�������������ܛ�C�����OӋ������ď��s�����ӣ��ڭh(hu��n)�������еđ������ܵ���K����ˣ��_�l(f��)һ�w����������Ը�֪ܛ�C�����ѳɞ�һ������עĿ���n�}��

�D1. �Ը�֪�(q��)���ݶ�ˮ���z�ĺϳɡ����ܺ͑���ʾ��D

�D2. PSMˮ���z�ĺϳ��c����

�D3. PSMˮ���z�ğ�푑��(q��)��

�D4. PSMˮ���z�Ĺ�푑��(q��)��

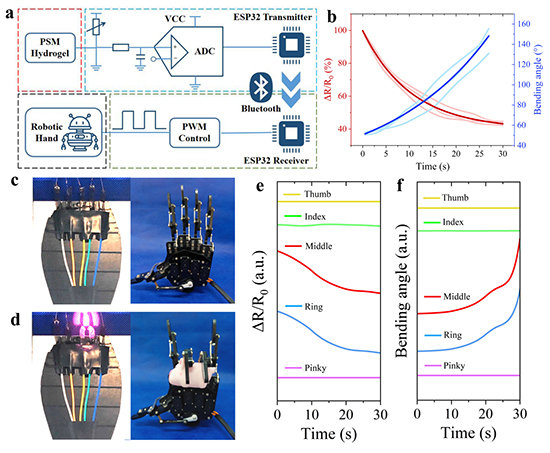
�D5. PSMˮ���z�Ŀɾ���׃�κ���Ϣ�@ʾ

�D6. PSMˮ���z�Ă�������

�D7. �Ը�֪�����˹����^
�D8. ܛӲ�C�����h�̽���ϵ�y(t��ng)
ԓ�о���������Bioinspired Multifunctional Self-Sensing Actuated Gradient Hydrogel for Soft-Hard Robot Remote Interaction�����}�l(f��)���ڇ��H֪���W�g(sh��)�ڿ���Nano-Micro Letters����Ӱ����ӣ�26.6�����|����W��ʿ�о���������Փ�ĵ�һ���ߣ���Ц�������ں���Ұ�����ڞ�Փ�Ĺ�ͬͨӍ���ߡ�
ԭ��朽ӣ�https://doi.org/10.1007/s40820-023-01287-z
- ���T��W�������n�}�M Sci. Adv.��ͬ�ı�ģ�巨�Ƃ���з����h(hu��n)���w�S�Y(ji��)��(g��u)�ď��gˮ���z 2025-06-25
- ���T��W�ܱ���F� ACS Nano�����ھ��S������Ż��������ı���ճ���������� 2025-06-24
- ���������ƾ��_���ڡ������W�i־�����ڡ�Sci. Adv.��: ܛ�M����Ώ��g�� 2025-06-23
- ����ꡢ����������ꐝ�/κ���ܡ�Adv. Mater.���������`���Թ���x��Ƥ�w��늈��T���p�ݶ�ˮ���z�x�Ӷ��O�� 2025-04-03
- ��h��W���������ڈFꠡ�Adv. Mater.���������ݶ�ˮ���z���w���c����Ⱥģ������ָ��ˎ��͵ă�(y��u)�� 2023-04-11
- �|����W��Ұ�n�}�M JMCA�������푑��Ӻͳ��ߌ���ԵĶ���ݶ�ˮ���z 2022-10-17
�\���P(gu��n)ע�߷��ӿƼ�

- �������C����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �A�ƴ�Ǻ��� Sci. Adv.����...
- �칤��܊/���r�F� AFM...
- ���ϴ�WƤ�������� Angew��...
- �Ĵ���W�~�ֽ��ڈF� Small...
- ���A������W�����n�}�M CEJ...
- ���ִ�W�������n�}�M ACS M...
- �������S���e���ڈF� Angew...
- ���ϴ�W����/�S�M�F� AFM:...
- ���T��W�������n�}�M Sci. ...
- �A���r(n��ng)�������/����...
- ��h�������l(w��i)�ֽ��ڡ���P��...