Ħ��늂����O���������|��늺��o늸Б������Ч�����܉��ⲿʩ�ӵęCе�̼��D�������̖���Ķ������|�X��Ϣ�ī@ȡ��������Ȼ�������y����Ħ��늲��ϣ��۶��������顢�����Ծ۰����������z�ȣ��ė���ģ���^�ߣ��c���w�M��֮�g���еęCеʧ���ɴ����|�X�����O�����˙C�����еđ��Î����˘O������ģ���ĸ߶�ʧ��͘O�͵�ճ����ʹ���y���c���w�͙C�����γ�협��ԵĹ��ν��|�ͷ����Ľ����B�ӣ��p���˿ɴ����|�X�����O����\�з����Ժ͂�����̖�ı����ݔ������������������Ӽ��g���Mһ���lչ��
���գ����p�wԺʿ�F��pϲ�����n�}�M�����wƤ�½M������Ȼ����Y�����l�������ͨ�^�����Ԛ��I�T���w�S������������x���ԣ����F��һ�N�����i��Y����Ƥ�w협���Ħ��늏����w�����þۺ���-�܄�-���܄�����Ø��������Ԛ��I�wϵ�����|�l����x���ɴ��Ƃ��Ħ��늏����w�����p�B�mܛ-Ӳ�ཻ��Y�������^�͵�����ģ����6.8-281.9 kPa�����������ܣ�880%���c���wƤ�w�����W������ƥ�䡣�ۼ���ϩ���u������ܛ�ࣩ�������w�S�أ�Ӳ�ࣩ���S���Ļ����u��ʹ�����w�߂䃞����Ħ�����O�Ժ���ճ��������90�����x��������70 N/m)������ԓ�����w���Թ���|�X����Ƥ�w�c�������������õĽ���͙Cе�����ԣ��O��ر��C��ܛ�|�X������̖�ı���ȺͿɿ��ԡ�ԓ����ʹ���Ԃ��в��ϵ��Ƥ�w�OӋ�͏V�������W�ӑB���{�Գɞ���ܣ������ܛ�C���˵��ɴ�����ӮaƷ�ďV�������ṩ��һ��ͨ��ƽ�_��ԓ헳ɹ����}����Compliant Iontronic Triboelectric Gels with Phase-Locked Structure Enabled by Competitive Hydrogen Bonding���l���ڇ��H�W�g�ڿ���Nano-Micro Letters���ϡ�
�����wƤ�½M���У����Ե�Ӳ֬�|�w���������ڏ��ԽM�����|�С��M�����|�ṩ��Ƥ�w��ճ���ԣ��Ƕ���е�֬�|�w���tؓ؟��ɢƤ�w׃���^�����ܵ��đ�������ͬ�Г���Ƥ�w�ĵ�ģ�����g�ԡ��@�N��Ȼ����Y������Ч��ؓ�d�D����ʽ��Ħ��늏����w���Ƥ�w�OӋ�ṩ�˷����`�С�

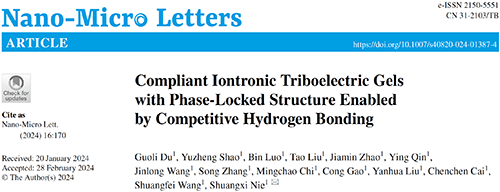
�D1.Ƥ�w협����w�S��Ħ��늏����w�ķ����OӋԭ��
�ڏ����w�ɹ��Ƃ�֮ǰ������x�ѽ���ǰ��w��Һ�аl�����������ӻ��W�е��ܶȷ�����Փ��DFT���ͷ��ӄ����W��MD��ģ�M��C���w�S��/HEMA/[Bmim]Cl�wϵ������x��������

�D2.ͨ�^�����Ԛ��I�T���wϵ����x
ͨ�^�{��CT��ԭ�����@�R���g�������w�е��i��Y���M�п�ҕ���������Y���C�������w�Ȳ��a���������B�m������x�������wϵδ�Y������ͬ�߶ȵ�Ӳ��ۼ��������������������ã��������w��ճ�����О�a��Ӱ푣��e���ڑ���푑���׃�η��档
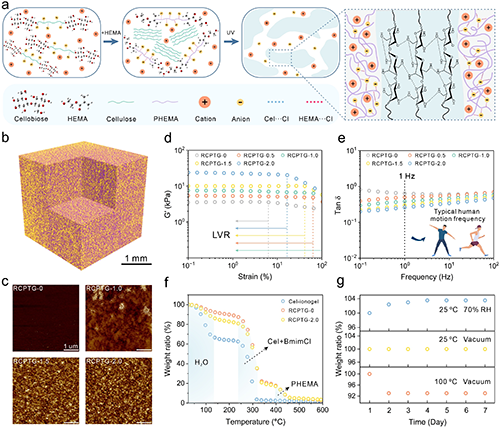
�D3.Ħ��늏����w����׃���ܺͭh��������
��Ч�����gؓ�d�D�ƙC����Ħ��늏����w�@�Ã����Ƥ�w���W���ܵ��P�I���ڑ��������£����Ҵ���w�S�ؚ��I�W�j���Ȕ��ѣ������Եغ�ɢ����������ϡ�轻�����Ծۺ���W�j�����[���L�ȣ��ڑ��������±�������죬��ͨ�^��׃�γ��ܑ�����
�D4.Ħ��늏����w���Ƥ�w���W����
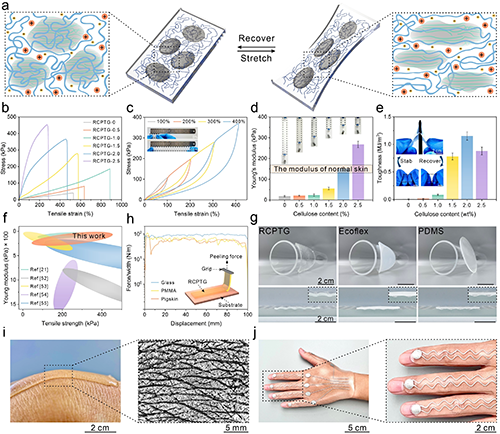
��Ħ��늏����w�����Ƥ�w�M�b��һ�N�Թ�늼��wƤ�w������ģ�M���Ƥ�w���|�X��֪�����������w���|�X����Ƥ�w��0~100 kPa�����Ⱦ����г�ɫ�Ă����`���ȣ����Ҿ߂����˲�B�ߑ��������������ص�Ħ��늂��ЙC��ʹ��ͬ�r���F�����w�R�e�����ȸ�֪���p�ع��ܣ���չ�����ھ�Ԯ������܊��Ӗ�������̽�y���I��đ��÷�����
�D5.����Ħ��늏����w���Թ���|�X��֪ϵ�y
���о������һ�N���ڸ����Ԛ��I������x�T���C�ƣ��Ķ��ɹ����ƾ��з������W���Ե�Ħ��늏����w��������Ȼ�ۺ�����ܽ�-�����^�̣�ͨ�^���܄����������Ԛ��I�wϵ�����lҺ-������x��ܛ���Ӳ��Ľ��洩��ʹ�����w������Ƥ�w�����ܛ���������ģ����150.6 kPa��ͬ�r����Cе�����@����ߣ����쏊�������810%���g�������1650%���ڴ˻��A���Ƃ��Ħ����|�XƤ�w�c���w������һ��������혷��Ľ��棬չʾ���Թ�늂��ЙC�ƺͷ������W���Եĸ�Ч�Y�ϡ�
ԭ��朽ӣ�https://doi.org/10.1007/s40820-024-01387-4
����c��؟�������W퓵ă������Ї��ۺ���W�ռ����W�ϰl������Ϣ�����@�á�Ŀ�����ڂ��f��Ϣ��������������ζ��ٝͬ���^�c���C�����挍�ԣ�Ҳ�������������h���H�ṩ����ƽ�_����������ؓ؟�����漰�֙࣬Ոϵ�҂����r�Ļ�h�����]�䣺
info@polymer.cn��δ�����Wͬ�ⲻ��ȫ���D�d��ժ��������������ʽʹ��������Ʒ��
