���C���ˣ������(sh��)���X�и��F(xi��n)����һ�ѽ�����������M�ɵ�Ӳ��������������ͨ�����ɸ��N��ĸ��˨ƴ�b�ɵ�Ӳ�w�C���ˡ�
���£��C�������߳�����ң����M�ϰ��յ��ճ�����Г�����΄�(w��)�����c�C���˴����ˁ��f���@�ӵ�Ӳ�w�O(sh��)Ӌ����ɰ�ȫ�L(f��ng)�U���ȷ��f����һ�����I(y��)�C���ˡ���С������������ˣ����������_��Ц�ġ����p�t��Ѫ���࣬�t����ӹǡ�
��Α�(y��ng)��Ӳ�w�C���˵İ�ȫ�L(f��ng)�U��
ȫ����Ĺ��̎�����Խ��Խ�A�����C���˸���ܛ��혏ĵ��O(sh��)Ӌ����������������Lj�Ӳ�ęCе�������ӽ��ڡ����p�w�����Ƶ�����С��������R�_�@�ӵĂ��y(t��ng)�(q��)�������@��ζ��ʹ�����조�՚⼡�⡱�����ڂ���ϵ�y(t��ng)���돗�ɽY(ji��)��(g��u)��


��Festo���՚⼡��C���˸���D
�ֱ���P˹������W(xu��)��Whegs�C���ˣ����R�_����݆֮�g��һ�������b�á�ײ���˕r������������һ�����������������������Ҋ�D��

Roomba�ߵؙC��������һ�����ӣ����ı��U���ɏ��ɳ��d�������Ɖ�ײ���Ė|���������܇�����Ӱ壩��

Roomba���U�ܵď��ɳ��d�b��
����һ���l(f��)չ�е��о��I(l��ng)��Q�������菽���о��ˆT��ͨ�^�љC���˼��g(sh��)������M�����̽Y(ji��)�ϣ��_ʼ�û�ļ���M������������C���ˡ�ͨ�^�⡢늴̼������տs���о��ˆT�ܿ��ƙC����֫�w�ď�����ʹ����������ˮ�����еȄ�����
�@���������������C�����w�B(t��i)��ܛ�����������ơ��������˵���߅�������@C�����@Ȼ����ȫ�����ң���Ȃ��y(t��ng)�C���ˣ��������h(hu��n)�����Ɖĸ�С�����⣬����C������Ҫʹ�àI�B(y��ng)���a������������Ҫ����늳ؽM���@ʹ������Ӳ�w�C���˸��p��

⁰��ϵ�����C����
����_�l(f��)����C���ˣ�
�о��ˆTͨ�^��ֳ��������������C���ˡ�һ���������x���u��������ļ����߹��������ڌ�����o�������õ�֧�����M����ֳ�����������|(zh��)�Ǹ߷��Ӿۺ��polymer������������ľ�������ϳəC���ˡ�����Ȼ���Ϻ�������ϵĻ���w��
���ǣ�����Ѽ����M��ֱ�ӷ��õ�ģ�ƹǼ��ϣ������ǰ���ڸ�������ġ�Ұ�U���L�����@��ζ������늴̼����������r�������M�����տs����������(y��ng)���ڸ������������o�����_���ƣ�����Ч�ʵ��¡�
���˸��ÿ��Ƽ������������о��ˆT�����������D�������g(sh��)��micropatterning�� �������ü���ϲ�g�ʸ����ϵIJ��|(zh��)�����߶Ⱦ��lӡ�ڹǼ��ϡ��@Щ���l����?q��)����á��������M���A�������������L�����ǣ��о��ˆT�@���˷����O(sh��)Ӌ�D���ļ������У���ΰѼ����տs����ʩ���ڻ���׃�ÿɿء���ˣ����м����܉�f(xi��)��������ʹ����C���˵��Ȼ������܉�������ǘӄ�����������һ�K�ܵ��̼��ͺ��y�տs����F��
�����ϳ�����C����
���˸��N����ϳəC���ˣ��о��ˆT��߀ͨ�^ֻʹ����Ȼ���ϣ���(chu��ng)�����һЩ����������C���ˡ�������ĸ߷��Ӿۺ��ﱻƤ�w�zԭȡ�����ɞ�C���˵��|�w�� �������ܵ�늴̼����������л���Ӿ�����о��ˆT�ܵ��t(y��)�W(xu��)�M�����̼��g(sh��)�Ć��l(f��)���_�l(f��)����ʹ��ֱ���ֱۣ��ұۣ���ǰ�ƄӵęC���ˡ�
߀�ЌW(xu��)�ߏ���Ȼ��@���`�У���(chu��ng)�����������ϳəC���ˡ����磬һ֧���������W(xu��)Ժ�ĈF��_�l(f��)������ˮĸ�C���ˡ�medusoid�������Эh(hu��n)�����е��|�֡����������D�������g(sh��)��ÿһֻ�|�ֶ��д�ӡ�ĵ����|(zh��)���l��ʹ��������������挍ˮĸ����M���ķ�ʽ���С������տs�r���|�����(n��i)�������Ƅ�ˮĸ�C������ǰ�΄ӡ�

����ˮĸ�C���ˡ�medusoid��
����������W(xu��)���о��ˆT��չʾ����Ρ��{�S������ϳəC���ˡ�����ʹ���D(zhu��n)�������K������������һ������ħ���~���������C���ˣ��������΄ӡ��@Щ��(j��ng)�^�������ļ��������܌��ض��l�ʵĹ⾀��������(y��ng)�����C����һ��(c��)�ļ�������һ���l�ʣ�����һ��(c��)����һ���l�ʣ��@�Ӿ���ͨ�^�⾀׃�������΄ӵ����ҷ���
������ǰ�΄ӣ����о��ˆT�ѹ⾀Ͷ�䵽�C����ǰ��������ļ������տs���������̖���~�w���f��ȥ���~�w������β�Ľ����տs�\�ӣ��ƄәC����ǰ�M��
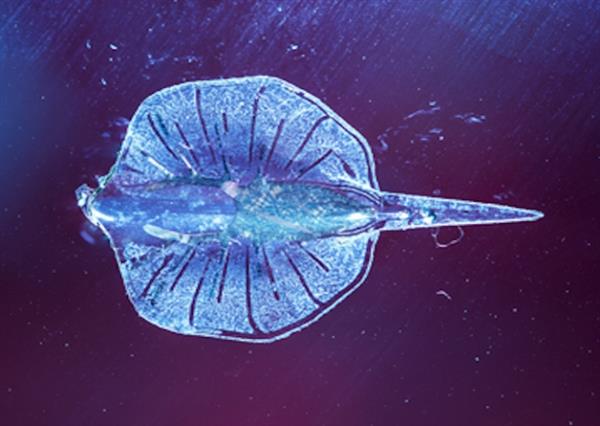


����ħ���~�C���ˣ���ɫ�����ǹǼ�
�����ѵ�����C����
�mȻ����ϳəC�����I(l��ng)���ѽ�(j��ng)�����S��ͻ�����Mչ�������@Щ�C�����̘I(y��)����Ͷ��ʹ�õĕr�C�hδ���졣Ŀǰ���@Щ�C���ˮa(ch��n)Ʒ�����̡�����ݔ��С���O��������̎������΄�(w��)���ٶȺ����������⣬ʹ���BͲ�����:���_�l(f��)�ęC���ˌ��h(hu��n)��ʮ�����С��e�����f���h(hu��n)���ضȱ�횱����c�����w�ؽӽ���߀�У��̈́���һ�ӣ�������Ҫ�����a��I�B(y��ng)����ι�I�B(y��ng)Һ��һ�����ڵĽ�Q�����ǣ�������C���˰��b���� �����Ƥ�w���˵ı��o���������ⲿ�h(hu��n)����Ӱ푲�����ô�������I�B(y��ng)Һ���a��Ҳ���Խ�����һ����(n��i)��ϵ�y(t��ng) ����������w�����ṩ�I�B(y��ng)��ѪҺѭ�h(hu��n)ϵ�y(t��ng)����
����һ�������ǣ� ʹ�ø�Ƥ���ļ��������(q��)������ ����ڄP˹������W(xu��)���W(xu��)�߂�ͨ�^�о��������B���ĺ�ţ��Aplysiacalifornica����̽�����Ŀ����ԡ���ţ��Ϣ�ڳ��g����ÿ�춼����(j��ng)�v���ز���}�Ȳ�˳��r���еĺ�ţ�����ڜ\����ˮ�֕��S�������l(f��)������r���܇��h(hu��n)�����}����֕����½������m��(y��ng)��(f��)�s��׃�ė�Ϣ�ؠ�r����ţ�M������Ӳ�Ě������o�Լ���
�о��ˆT���F(xi��n)�˰Ѻ�ţ����M�������(q��)���������(q��)������ϳəC���ˡ��@��ζ�����҂������@Щ�����ѵļ����M������������C���ˡ����h�W(w��ng)�@Ϥ��Ŀǰԓ�C�������ܰ��\��������w����1.6Ӣ���L1Ӣ�猒��



���ֲ��ú�ţ�M��������C����
����(zh��n)�cչ��
����C���˵���һ������(zh��n)�ǣ�Ŀǰ߀�]���аl(f��)���κ�һ�N�C�d����ϵ�y(t��ng) ���b�ڙC�����ϣ������̎���ֻ��ͨ�^�ⲿ늈����߹⾀���������������_�l(f��)����ȫ����������ϳəC���ˣ��҂���Ҫ��ֱ���c�C���˼���M�����������ṩ������ݔ��ĵĿ�������������ֱ�ӵķ��� ���y�ȿ���Ҳ����ǣ�ʹ����(j��ng)Ԫ����(j��ng)Ԫ��Ⱥ�M�ɵ���(j��ng)�ИУ������������������
�@���о��ˆT��ʲô����ţ��ô�������һ��ԭ����������(j��ng)����W(xu��)�о�����ģ��ϵ�y(t��ng)�����кܶ��ꡣ������(j��ng)ϵ�y(t��ng)�c����֮�g���P(gu��n)ϵ�ѽ�(j��ng)�о��ñ��^�ء��@���������(j��ng)Ԫ������������������_�˴��T���������о��ˆTϣ���ܽ�����������������V�C������ô�Ƅӣ���������̎�����N�΄�(w��)�������f�����ж����|(zh��)���S���⡣
�ϳ������I(l��ng)����̎�ڋ냺�ڣ����о��ˆT���ў����O(sh��)�����S����(y��ng)�È����������f���������һ��ʹ�ú�ţ�M��������C���ˣ�Ȼ���һ��Ⱥጷŵ�ˮ����ߺ�ˮ��ь�ˮ��й¶�����ж����|(zh��)�������@Щ�C����������M���Ƴɣ���������ĵ������߱����~�Ե������������h(hu��n)����ɺܴ�Ӱ푡�
������ʹ����������������C���˿ɱ���(y��ng)�����t(y��)���I(l��ng)�����������M�а���ˎ��ݔ�͡�̎��Ѫ˨����ɞ�ɿ��ơ����{(di��o)��(ji��)��Ѫ��֧�ܡ��@Щ����C�����b������˥����Ѫ�ܣ����A(y��)�����}��������ʹ��������|(zh��)�������Ǹ߷��Ӿۺ�������ܱ������{(di��o)�������S�r�g�ɞ黼�����w��һ���֡����⣬����M�����̌W(xu��)���Mչ�������_�l(f��)����ѪҺѭ�h(hu��n)ϵ�y(t��ng)���ܿ��ܴ��_һ���µĴ��T���������ЄӵĴ�������C���ˡ�
�����Ǖr��������ό����y�ֱ�����������C���˵ą^(q��)�e����������˼���ǣ�������һ������������������W(xu��)�����ġ���ˡ��C���ˌ��ڼ��g(sh��)�ϳɞ���ܡ������ڬF(xi��n)���Е����������@ô������ȡ�Q�ڂ������M������������С�������Ԇ�����ͬ־���Ўׂ��ܿ��ܡ�Ů�͡����T���أ���ι�������C���˹�˾�ᣬ����ӆһ������Ұ���g(sh��)�İl(f��)չ�Dz�����ģ��˶���ħ��һ�����_���͛]�з��ء��@�����˶������ȷ����S�ܲ�ǡ����������@헼��g(sh��)�M���ĽY(ji��)�������Ǻá����������ݣ����nj����������¡��������˵����¶��x�����������������ďص�׃�
- �Ϸ��Ƽ���W(xu��)�����w���ڈF� Matter�����Ԃ�����������ͻ�� - �������x���gճ���c���`����֪ 2025-07-01
- �A�ƴ�Ǻ��� Sci. Adv.�����؏�(f��)ʹ���������ϵ�y(t��ng)�����t(y��)�������O(ji��n)�y 2025-06-26
- ���_���������n�}�M����2026����W(xu��)����Tʿ��ֱ������ - ���όW(xu��)�����W(xu��)���߷��ӡ�����W(xu��)�������c�w�S��Ӌ��ģ�M�������Ϣ... 2025-06-13
- ���ϴ�W(xu��)���i/�ӱ������ϴ��۵ȡ�InfoMat��������ˮ���z�pģ�B(t��i)�����������C�������ܲ���/ܛӲ���R�e 2025-06-13
- �����������܈F� Adv. Sci.���ܿ�܉���l(f��)�ĭh(hu��n)����(q��)���� 2025-04-30
- ��h��W(xu��)����������n�}�M Nat. Commun.������ͻ��ʧ��(w��n)���ԵĚ��ˮ���z�˹����� 2025-04-10
�\���P(gu��n)ע�߷��ӿƼ�

- ���ܹ��A��朆���������22��...
- �������C����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h���ڈF� AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈFꠡ�Ac...
- ���W(xu��)����������T PRL����...
- �㽭��W(xu��)�Ǿ�܊���������F�...
- �����ִ�Źٱ����ڡ�������...
- �п�Ժ�{����Դ�����ܡ�����...
- �V�t(y��)��Ժ���١��V���T��ܰ N...
- �������i�w/���������...
- ����炐�ȁ���W(xu��)���h����...