�������պ����W�c����һ�ҹ�˾���պ������Ƴɹ�ܛ�w���~�|�֙C���ˣ�δ�팢�����ڹ��I(y��)���t(y��)�������͡����յ��I��


�˴��ɱ������ܼ��g�c�b���о�����ܛ�w�C���ˌ�����c����������Ƶķ����C���˘әC��һ��ܛ�w���~�|�֙C���ˡ�����ܛ�w�|�֏���Ȼ���е��^��Vܛ�w��������~�����\�ȣ��������Y���@���`�У��ɽӽ�����ܛ�M�����ϽM�ɡ����y(t��ng)���ԙC������Ҫ�Ʉ��Բ���(����٣��մɣ��������ϵȸߗ���ģ��Ӳ��)�Ƴɣ����п����y�ȴɱ��ߣ���ȫ�Ե͵Ȳ��㡣�ڲ���ܛ�|�����顢�Π���s���ߴ�׃�������w�r�������F(xi��n)��Ч�ʵ͡���ȫ�Բ�דpĿ�����ȱ�c������ܛ�w�|�ֿɿ��ٌ��F(xi��n)�䏝���p�@�\�ӣ��Ȃȷֲ������P����Ч���������w���������c�p�@�ɷN��ʽ�Y�ϣ����F(xi��n)����N��ͬ�Π��ͬ�ߴ硢��ͬ�[���ˑB(t��i)���w�İ�ȫ���o�p����(w��n)��ץ�֡�

ܛ�w�C������һ헲��ϡ����W������W���Ԅӻ��ȶ��W�ƵĽ����о���Ҳ��Ŀǰ���H�W�g���ǰ�؟��c���C�����I���������ң����ࡢ�L���W����������ڱ�ʾ����Ȃ��y(t��ng)�����w�C���ˣ�ܛ�w�C���˾߂������ʹ����Ը��Ӹ�Ч����ȫ���c�����Ȼ���M�н�����ܛ�w�C����δ��߀���ԑ��õ����ա��t(y��)�����͵��I��

��(j��)��B��ܛ�w���~�|�֙C���˘әC���OӋ�����졢���W����������ϵ�y(t��ng)���ɱ�����У�о�����ɣ��Ŀؓ؟�˞鱱���Cе�����c�Ԅӻ��WԺ������������
�Ї��ƌWԺ�Ԅӻ��о����о��T�������C�����о���������־�J�飬ԓ����ܛ�w�C���˵��о����H�����ڽ�ʾ��Ȼ�������ڲ��ϡ����W���\�ӌW����ĿƌWԭ����߀�������Ƅ��²����c�C���ˮaƷ���аl(f��)��
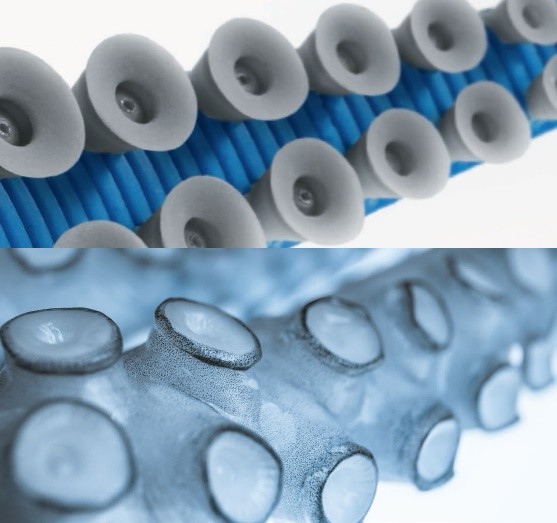
ԓ�Ŀ�@���˵�Festo������ܛ�w���~�|�֡���������Ȼ�ƌW�������c�Ŀ������ܛ�w�C���˵�ˮ�h(hu��n)����֪�cĿ��ץȡ������������μ��˲��Ŀ��֧�֡�
- �B�T��W�܌W������ Macromolecules���ߏ���𤳬���w�ӑB(t��i)�߷��ӾW�j�ķ����OӋ����߶���׃��Փģ�M���� 2025-07-03
- ̫ԭ������W�����ֽ��� Adv. Sci.: ������z�x�ܷ�����ģ�ԱO(ji��n)��ָ�����w 2025-07-02
- ���ϴ�W������/����Ⱥ/���� Adv. Mater.����������ʿ�{�{��ܷ��������ݶȿ���Ϳ�� 2025-07-01
- ���ϴ�W���i/�ӱ������ϴ��۵ȡ�InfoMat��������ˮ���z�pģ�B(t��i)�����������C�������ܲ���/ܛӲ���R�e 2025-06-13
- �����������܈F� Adv. Sci.���ܿ�܉���l(f��)�ĭh(hu��n)������� 2025-04-30
- ��h��W����������n�}�M Nat. Commun.������ͻ��ʧ��(w��n)���ԵĚ��ˮ���z�˹����� 2025-04-10
