�����ڂ��y(t��ng)�ęC(j��)���ˣ�ܛ�w�C(j��)�������ھ��ИO������ɶȺ�׃�������������a(ch��n)����t(y��)����Ԯ�����պ����܊�µ��I(l��ng)����о�đ�(y��ng)�Ý�������ܛ�w�C(j��)���˳ߴ罵���������£������ڪMС���g��(n��i)����U��M�p�������w��(n��i)����ɸ��N��(f��)�s���I(y��)��С�ߴ�ܛ�w�C(j��)����һ����Ժ��η֞�ɲ��֣��Ӳ��֣����w���������(q��)�әC(j��)�����\(y��n)�ӣ��c�����|�IJ��֣��㲿�����Q���˙C(j��)���˵��\(y��n)��������Ŀǰ���˂���ܛ�w�C(j��)���������M(j��n)���ˏV����������о��������C(j��)���˵��㲿�O(sh��)Ӌ�s���٣��ܶ�С��ܛ�w�C(j��)��������ȱ���㲿�O(sh��)Ӌ��ֻ�������������c�����|��ȱ�����õ��㲿�O(sh��)Ӌ���C(j��)����������Ҫ�ֲڻ��������Y(ji��)��(g��u)�Ļ��ױ�����ṩǰ�M(j��n)�\(y��n)�ӵķ����������C(j��)�����\(y��n)�ӵľ��_����Ҳ���ܵ����ơ�
������֪���ڻ������ڎ����еı������\(y��n)�ӣ�������ֱ�ĉ����������컨��ȣ����_�ϵĶ༉��ë�Y(ji��)��(g��u)�������P(gu��n)�I��ɫ���{�ׄ�ë�Y(ji��)��(g��u)���S�ڻ��_�c���N�����g�γ�����𤸽��������ëĩ�˵�Ĩ���νY(ji��)��(g��u)���Ԯa(ch��n)�����з����Ե�Ħ����������ڻ��_�M(j��n)�п��ٵ�𤸽/Ó���ГQ���Ķ������Ƅӡ���һ���棬�����\(y��n)���О�ʹ�������Ա���ǰ������̶��ڽ��|���棬���C��������С��֦�ȱ��������Єӡ��ܵ��ڻ���ë�Y(ji��)��(g��u)�ͳ���\(y��n)�Ӳ��B(t��i)�Ć��l(f��)����h��W(xu��)Ѧ���������n�}�M��NISE-Lab���O(sh��)Ӌ�Ƃ��һ�N��������ܛ�w�C(j��)����Geca-Robot���D1�����@�N�C(j��)���˽Y(ji��)��(g��u)���Σ��ɡ��㡱�͡����w���ɂ����ֽM�ɡ��C(j��)�����㲿��±ڻ���ë�Y(ji��)��(g��u)��������������У���푑�(y��ng)���w׃���ṩ�(q��)�����������ṩ�����ԵĿ���Ħ�����������\(y��n)�ӡ������w�����⣩�������������PDMS�͎����ʯīϩ/PDMS��(f��)�ϲ��ϣ�GP���������нM�ɡ�����GP��ʯīϩ�Ĺ��Ч��(y��ng)���������w����Û/�տs��Geca-Robot�ṩ�(q��)�ӡ�������t���ȫ�����ⶼ�����(q��)��Geca-Robot�M(j��n)�ж����\(y��n)�ӡ�
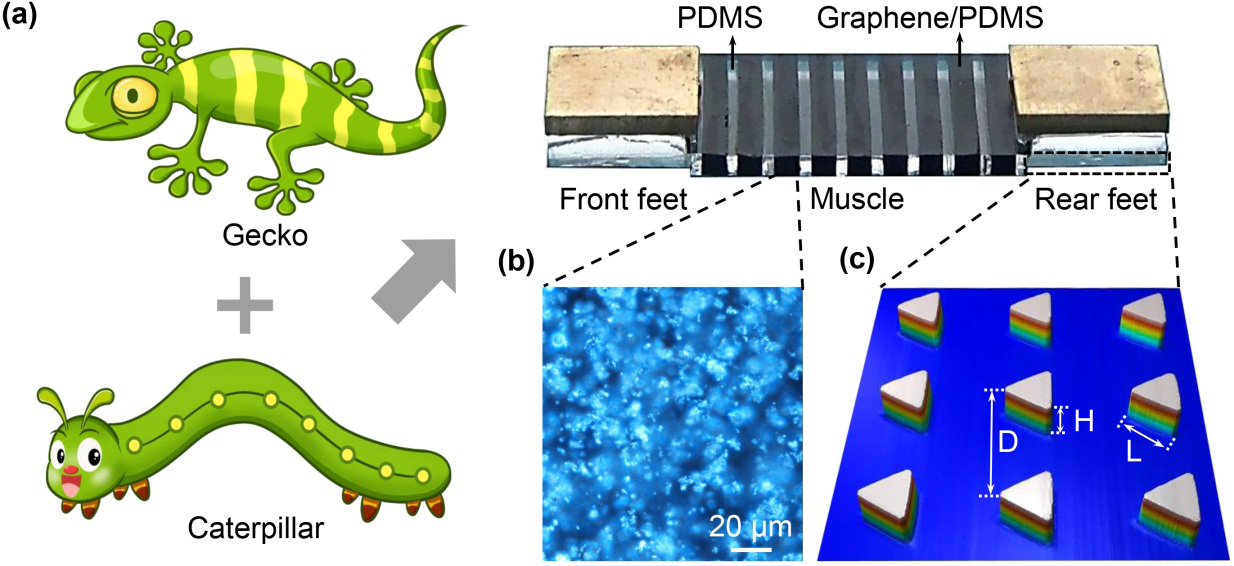
�D1. ��a���ܱڻ��ͳ��l(f��)��Geca-Robot���䣨b�����ⲿ��ʯīϩ/PDMS��(f��)�ϲ��ϣ�GP��������W(xu��)��Ƭ�ͣ�c���㲿����������������S�D��
Geca-Robot���\(y��n)�әC(j��)��飺ǰ��������������������о�����ͬ��ȡ����������еĽ�ָ��C(j��)���˵�ǰ�M(j��n)����(d��ng)�㲿������������������ܵ���ͬ���з����������r����������߅�����Ħ������fE�����Ǵ����ؽǷ���fA����Ħ��������ʼ�K�����෴����(d��ng)Geca-Robot̎�ڴ���ģʽ�r��ǰ������c���ױ��ֽ��|���D2a�������Օr��Geca-Robot���ⲿ�ְl(f��)����Û��ǰ������ܵ���Û������F+����ǰ���ܵ���F+��������ǰ�������ܵ���F+��������D2b������(d��ng)F+�S�����Օr�g�����L��u���������Կ˷�ǰ��Ħ����fA�r��ǰ���_ʼ��ǰ���ӡ��˕r��F+�����^�m(x��)���ӣ�ʼ�K�cfA��ƽ����һ���棬����F+ʼ�K�����Կ˷���������\(y��n)������Ħ����fE�������ϵ�������ЃH��ԭ�ذl(f��)���p����׃�Σ��������^����B(t��i)����(d��ng)����ֹͣ�r��Geca-Robot�����տs���տs������F-�cF+�����෴���Ķ���(d��o)��ǰ��������Ħ�������˕rǰ�㻬����˷�Ħ����fE��������˷�fA�����ԣ���(d��ng)F-������fA�r�����マ(y��u)���_ʼ��ǰ�Ƅӣ��տs�������������ӣ�ǰ�㱣���^����B(t��i)���D2c����ͨ�^���յ��_/�P(gu��n)ѭ�h(hu��n)���(q��)��Geca-Robot�Գ���\(y��n)�Ӳ��B(t��i)��ǰ�\(y��n)�ӡ�Geca-Robot�\(y��n)���^�̷�(w��n)���Ըߣ�������ͨ�^�{(di��o)��ݗ�ղ��L����(qi��ng)�Ⱥ��P(gu��n)���_�P(gu��n)���ځ��M(j��n)�о��_���ơ�

�D2. Geca-Robot��ͬ��B(t��i)���\(y��n)�Ӳ��B(t��i)����a��stand-by����b��light-on�ͣ�c��light-off�A��ǰ�㣨���(c��)���ͺ��㣨�҂�(c��)����B(t��i)����(d��ng)���c���ױ��ֽ��|�r�����������@ʾ���ɫ���l(f��)�����ӕr�@ʾ��\��ɫ���^����B(t��i)���F(xi��n)�����������Ӱl(f��)������׃�Ρ�
���ڽY(ji��)���˷±ڻ���ë���㲿�Y(ji��)��(g��u)��Geca-Robot���F(xi��n)����(y��u)���ȫ�����\(y��n)���������D3�����ڹ⻬/�ֲڱ���������/�����������M(j��n)�з�(w��n)���\(y��n)�ӣ��ڃA�Ǹ��_(d��)30��Ĺ⻬���������Կ��Է�(w��n)���\(y��n)�Ӷ������l(f��)�����ƣ�������100 ��C��-17 ��C������(n��i)�ı������\(y��n)�ӣ����F(xi��n)�������д�ضȷ�����O�˜ض�׃���h(hu��n)���������m��(y��ng)�ԡ����⣬Geca-Robot߀���Ѓ�(y��u)���ؓ(f��)�d����������ؓ(f��)�d���^������50�������ﷀ(w��n)���\(y��n)�ӡ�

�D3. Geca-Robot��a���ھ��в�ͬ�ֲڶȵĸ��������\(y��n)��λ�ơ���D�鲻ͬ�ֲڶȱ����3D��ò�D���t�c(di��n)����Geca-Robot�ڹ⻬����������\(y��n)��λ�ƣ���b����Ra�ֲڶȞ�4.1��m����ˮ���治ͬ�r�g�c(di��n)���\(y��n)���^�̈D����c�����������^�̲�ͬ�¶ȗl���µ��\(y��n)��λ�ƣ���D�������^���е�Geca-Robot����d����100 ��C�� -17 ��C���Ҝؗl���²�ͬ�\(y��n)�����ڵ�λ�ƣ���e���ڲ�ͬؓ(f��)�d�r���\(y��n)��λ�ƣ���D��Geca-Robotؓ(f��)�d50�����������������f��ؓ(f��)�d3.8 g�����ڱ�ˮ�θ��w�Ĵֲڽ��ٻ��ױ���������^�̽؈D��
Geca-Robot���㲿�O(sh��)Ӌ�������ȫ�����\(y��n)���������P(gu��n)�I������С�ߴ�ܛ�w�C(j��)���˵��аl(f��)�ṩ����˼·���@�N�㲿���(q��)���O(sh��)Ӌʹ�������ƽ���(n��i)�l(f��)����׃���x��Geca-Robot�ڪMխ���]�h(hu��n)�����I(y��)��������������Ա��t���(q��)�ӵ����ԣ�ʹ�������t(y��)�����I(y��)��(y��ng)���I(l��ng)����о�(y��ng)�Ý�����
ԓ�ɹ��l(f��)���ڲ����I(l��ng)��피��ڿ�Materials Today��IF��24.372���ϣ������x���(n��i)�������¡�Փ�ĵĵ�һ���ߞ���h��W(xu��)�����c�C(j��)е�W(xu��)Ժ��ʿ��������ͨӍ���ߞ����ٽ�����Ѧ����������ԓ�о��õ��������c(di��n)�аl(f��)Ӌ���Ŀ�͇�����Ȼ�ƌW(xu��)�����֧�֡�
NISE-Lab�L�������ڷ���𤸽���ϵ����P(gu��n)�о������P(gu��n)�ɹ�߀��Small, 2019, 1904248��ACS Appl. Mater. Interfaces��2019, 11, 46337��ACS Nano, 2017, 11, 9711��Adv. Funct. Mater. 2015, 25, 1499��Nat. Commun. 2015, 6, 6621��Nano Lett., 2013, 13, 5541�ȇ��H피��ڿ��Լ�������Bio-Inspired Structured Adhesives����Springer, 2017����
���P(gu��n)Փ��朽ӣ�https://doi.org/10.1016/j.mattod.2019.12.028
NISE-Lab �n�}�M�W(w��ng)վ��http://niselab.whu.edu.cn/
- �����������܈F(tu��n)� Adv. Sci.���ܿ�܉���l(f��)�ĭh(hu��n)����(q��)���� 2025-04-30
- ������܊��/�܊μ���ڈF(tu��n)� Adv. Sci.����ܭh(hu��n)����֬�о������M(j��n)չ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ�����(q��)����ʎ���������ܛ�w�C(j��)���� 2024-10-26
- ��ɽ��W(xu��)����n�}�M CEJ�����ßɹ�⧜猍�F(xi��n)�h(hu��n)������Ϳ����ʯīϩ���^��ɢ�Ŀ�ҕ���c�����u�� 2025-07-08
- ��������������/鐾��`�F(tu��n)� JMCA: ��������/ʯīϩ�����z�ķּ���Y(ji��)��(g��u)���F(xi��n)���W(xu��)��늴����μ��� 2025-06-19
- ���ڼ��g(sh��)��W(xu��)ʷ��(j��)�|�� Carbon������ʯīϩ-�{���w�S�؏�(f��)�ϱ�Ĥ�����ޏ�(f��)��(y��ng)׃/����pģ���������O(sh��)Ӌ���ڿɴ��������O(ji��n)�y�đ�(y��ng)�� 2025-05-28
�\���P(gu��n)ע�߷��ӿƼ�

- ���ܹ��A��朆���������22��...
- �������C(j��)����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h(yu��n)���ڈF(tu��n)� AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈF(tu��n)ꠡ�Ac...
- ���W(xu��)����������T PRL����...
- �㽭��W(xu��)�Ǿ�܊���������F(tu��n)�...
- �����ִ�Źٱ����ڡ�������...
- �п�Ժ�{����Դ�����ܡ�����...
- �V�t(y��)��Ժ���١��V���T��ܰ N...
- �������i�w/���������...
- ����炐�ȁ���W(xu��)���h����...