ʹ��ץ�����w�M��ץȡ�Ͳٿv��������a�Ϳ����е�һ헻����΄ա���Ȼ���У��������`���צ�ӣ�������`�ɵ��p�֣����Էdz��p�ɵ�����@�ӵ��΄գ������Cеϵ�y���f�s��һ���������Cеץ��Ҫ̎�������w�ߴ��ȴ��Π�����Ҏģ�Ď�ʮӢ����@ʾ��������ʮ�����Ԫ�������@Щ���w�M����^(>1 mm)�����^(100 ��m��1 mm)���^(<100 ��m)�ߴ磻�IJ���Ƭ��С��飬�ٵ�耳״����@Щ���w���Π��N���ӣ�����ˮ���Ϸ֒��Ć����w����������������Ƃ��Micro-LED�@ʾ���M�b�г�ǧ���f��Ԫ�����@Щ���w�Ĕ���Ҏģ׃����һ������߀����Ҫ����һ����ץȡ����Ԫ�������x���Ե�ጷŲ���Ԫ��[1]��
һ�N����Ȼ���OӋ��ʹ�ö�ָ�Cеץ�֣������˺̈́���һ�ӡ��������о�չʾ�˶�ָץ�����ڲٿv��ͬ�Π����w�ă���[2]��Ȼ�����@�N�������ƵĶ�ָץ�֙Cе�Y�����s��߀��Ҫ���ɴ�����������������[3]��ͬ�r����ָ�Cеץ�ֵĿ���Ҳ�������s��������Ҫ�������ɼ����W/ҕ�X��̖���ڴ����A����������̎���������s���㷨[4]���_��ץ��ץȡij�����w�ķ���(�����f��ָҪ�����_�������wҪʩ�Ӷ���������Ҫʩ����ʲô�ط���)�����⣬��ָ�Cеץ�֟o��̎������������w[2]�������wС���^�ߴ��r����ָ�Cеץ�ֽY��׃�÷dz����s�����y�ӹ��Ϳ��ơ�
����һ�N������ʹ�����P������ؓ����ץȡ���w[5]�����Pʽץ�ַdz��m���ڎ��Π�Ҏ�t������⻬�����w���粣������Ƭ�ȡ����nj��ڎ��ΠҎ�t������ֲڻ�����С�ߴ�����w�����P���ܷ�����һ���ܴ�Ć��}��
��Ȼ���У��ڻ��Ȅ�����Էdz��ι̵�ճ�������w���棬ͬ�r���ܺ�����Ó�_���ܴˆ��l���о��߂�����������ɿط����ߠ�˹������ճ��ץ��[6��7]���ں��^�ߴ��£���ճ��ץ�ַdz��m����ƽ�����w��ץȡ���������������S���w�r���s����һ�����ڵ�ì�ܣ�һ���棬ץ��Ҫ���ܛ�����m�����w�ı����Π����ץ���c���w�����|��e������ճ�����Á�����ץȡ������һ���棬ץ����Ҫ���Ӳ���Ե�������Óճ���������w�����������^�ߴ��£���ճ��ץ�ֱ��ɹ�����ƽ�����w�ĽM�b���e��������������й���Ԫ���ĽM�b[7��9]�������ڷ�ƽ��Y����Ԫ�����������|��e���ɿأ�ճ��׃�ò��������@�N���������m�á����⣬��Ԫ��׃�ø�С�r��ճ������̫��������KԪ����ጷš�
�������������һ�Nʹ���Π�ӛ���ۺ���(shape memory polymer��SMP)������������ץ����ȫ���f��ץ������[10]����D1��ʾ��ԓץ�ֽY���dz����Σ�����һ�K�Π�ӛ���ۺ���K�w�����������ɲ�ͬ�Ĵ�С���Á�̎����ͬ�ߴ硢�����Π��ͬ����Ҏģ�����w(�D2)��
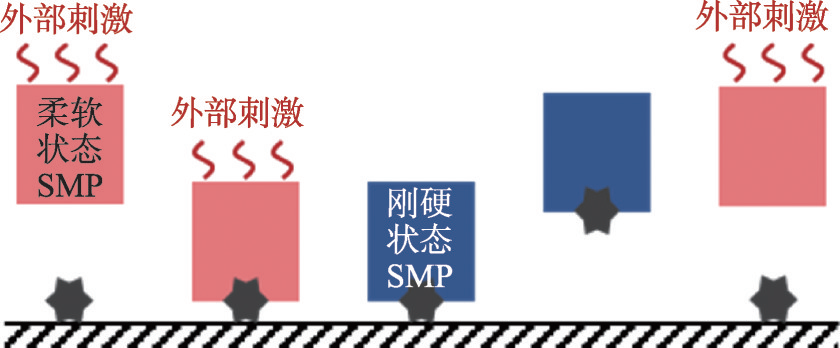
���������Π�ӛ���ۺ�����ⲿ��/��̼�����׃ܛ��������׃�Σ��˕r�����p�ɵ،����wǶ�����С�֮��ȥ�ⲿ�̼����Π�ӛ���ۺ���͕�׃��Ӳ��B��һֱ����סԓ׃�ε��R�r�Π�����w�iס���@�ӾͿ������wץȡ�����Ƅӵ�Ŀ�ĵء������Ό��Π�ӛ��������ʩ���ⲿ�̼����Π�ӛ���ۺ���͕��֏���������Π�Ķ������wጷų�����

�D2 ʹ���Π�ӛ���ۺ����f��ץ�ֲٿv10 ��m��1 m�ߴ硢�����Π�����w[10]
����չʾԓ�����Ŀ����ԣ�����ʹ��һ�N�h�������Π�ӛ���ۺ���[11](�h�����w E44���̻��� Jeffamine D230���|���Ȟ� 81��46)���Ƃ�ץ�֡�ԓ�Π�ӛ���ۺ����ڵ���45��r̎�ڄ�Ӳ��B������45��r̎����ܛ��B�����Hʹ�Õr���ӟ�ضȺͼӟ�r�gȡ�Q��ץ�ֵijߴ��c�ӟ�ķ�ʽ���������ں��^���wץȡ���Π�ӛ���ۺ���ץ��(60 mm×60 mm×5 mm)��ʹ��120��ğ��ӟᵽ��ܛ��B��Ҫ30 s���������^�w���ٿv��ץ��(ֱ��320 ��m���߶�450 ��m)��ֻҪ�ß��L����120���¼ӟ��1s������
ԓץ������ƽ�����w����a���ܴ��ճ�����ȡ��ڹ⻬����(����ֲڶȞ� Ra=0.019 ��m)�ϣ���ճ�����Ȟ� 113.9 kPa���ͱڻ� 100 kPa ��ճ�����ȿɱȡ���ʹ�ڴֲڵ�ĥɰ����(����ֲڶ� Ra=2.2 ��m)�ϣ���ճ��������Ȼ���_ 81.7 kPa����D2��ʾ������ʹ��ԓ�f��ץ��ץȡ��һ�K 0.3 m×0.4 m �Ĵֲڲ�����
ԓץ���������S���w�Ϯa���ܴ��ץȡ����һ�K 55 mm×55 mm×15 mm ���Π�ӛ���ۺ�������һ���⏽ 10 mm���ȏ� 8 mm ���F���Ϯa�� 171.7 N ��ץȡ������ץ������������330����������������һ����ħ���Y���p��ץ�ֵ�120��[12]���D2��չʾ��ʹ��ԓץ��ץȡ������ 4.16kg �Č��ƽ�_�����⣬ԓץ�ֽY�����Σ����Էdz�����ؿs�ŵ���ͬ��С��ץȡ 10 ��m �� 1 m �ߴ�֮�g�����Π��ͬ���������w����耳ס���ᔡ������С���ĸ��С�������еȺ��^���w��7×7 �� 1 mm �����У�10×10�� 500 ��m/300 ��m ���^�����У��Լ��ٿv 75 ��m ��С�IJ�Ҏ�t�F�w���� 10 ��m ֱ���Ķ���������
�����wС���^�ߴ�( 100 ��m ���һ��߸�С)�r�����w�ܵ��ı�����(�e���cץ�ֵ�ճ������)�������o���w��ጷŎ����^������𡣌������S�Y�������w(��D2 ����ʾ�� 75 ��m ��Ҏ�t�F�w���� 10 ��m ֱ���Ķ���������)��ጷź��cץ�ֵĽ��|��eС��ճ����Ӱ��^С����Ȼ�������Óճ����һЩƽ������w(��Micro-LEDоƬ)��ጷź��cץ�ֽ��|��e��ճ�����ú����y�Ԍ��Fጷš�
����������f��ץ�ֲ��ԣ�����Ƕ���iס�ķ�ʽץȡ���w����������ճ������ˣ���ճ����K�^���wጷŕr���Ϳ���ͨ�^���滯�W̎�����������ӱ���ֲڶȵķ�ʽ��p��ճ�����õ�Ӱ푣��Ķ����C�^���w�����ጷš�����չʾԓ���ã������Ƃ��˱���ֲڵ��Π�ӛ���ۺ����f��ץ�ց��M��Micro-LEDоƬ�ĽM�b(�D3)���������Π�ӛ���ۺ������׃�ֲ�(�D3(a))�������ճ���@�����Ͷ�ץȡ����������Ӱ�(�D3(b))���Ķ����CLEDоƬץȡ��ጷŵĿɿ��ԡ�ʹ�ü���ֲ��ӟ�ጷ� LED оƬ(�D3(c)��(e))�����ܰ�����Ҫ���x���Ե�ጷźͽM�bLEDоƬ(�D3(f)��(g))��

�@�N�f��ץ�ֲ����ܴ���Ⱥ���ץ�ֵĽY���c���ƣ����Էdz����ؿs��ץ�ֵĴ�С��̎����ͬ�ߴ硢�����Π��ͬ����Ҏģ�����w���e�����^��r�£�����Ƕ��ץȡ�ķ�ʽ���[Ó��ճ�����^���wጷŵ����ƣ����^Ԫ���Ĵ�Ҏģ�M�b�ṩ����˼·��δ��߀��Ҫ��ץ��푑��ٶȺ͌����w���ϵ��m���Է����_չ�Mһ�����о���
�����īI
[1] Huang Y et al. ACS Applied Materials & Interfaces��2016��8(51)��35628
[2] Shintake J et al. Advanced Materials��2018��30(29)��1707035
[3] Kappassov Z��Corrales J��Perdereau V. Robotics and Autonomous Systems��2015��74��195
[4] Honarpardaz M et al. Robotics and Autonomous Systems��2017��87��104
[5] Mahler J et al. Science Robotics��2019��4(26)��eaau4984
[6] Linghu C et al. Soft Matter��2019��15(1)��30
[7] Luo H et al. National Science Review��2020��7(2)��296
[8] Carlson A P et al. Advanced Materials��2012��24(39)��5284
[9] Linghu C et al. npj Flexible Electronics��2018��2(1)��26
[10] Linghu C et al. Science Advances��2020��6(7)��eaay5120
[11] Zheng N et al. Polymer Chemistry��2015��6(16)��3046
[12] Li S G��Stampfli J J��Xu H J et al. A Vacuum-driven Origami��Magic-ball��Soft Gripper. 2019 IEEE International Conference on Robotics and Automation. 20��24 May 2019
ԭ��朽ӣ�http://www.wuli.ac.cn/CN/abstract/abstract75997.shtml
