ܛ�w�(q��)������ܛ�w�C���ˣ������������ܿ��ƣ��˹����ܺ�ҕ�X�����I(l��ng)���ܵ��ˏV�����P(gu��n)ע��ͨ�^���졢�տs����Ť�D(zhu��n)׃�εĽM�ϣ����Ԍ��F(xi��n)��ͬ��͵��\�ӣ����珝�����L�Ӻ����S��ܛ�w�C������Ҫ�����(q��)����������ͨ�^�˹������e����Ƅ����w���(zh��)��ijЩ���������⣬�ڸ�����ϵ�y(t��ng)���_�l(f��)�У�߀��Ҫ���ɸ�֪����̖��ݔ�Ϳ��ƹ��ܵ��(q��)�������@�Mһ�����l(f��)�ˌ�����(q��)����������
���_��W(xu��)����������������ڡ�Advanced Functional Materials���ϰl(f��)���ľC����Progresses in Tensile, Torsional, and Multifunctional Soft Actuators�������Y(ji��)�˿��Ԉ�(zh��)�������Ť�D(zhu��n)�(q��)�ӵĸ��N��͵�ܛ�(q��)���������������w�S���Π�ӛ���߷��ӡ�ˮ���z��Һ���߷��ӡ���(d��o)늾ۺ����Լ���Ȼ�����ȡ����⣬ԓ�C��߀���e�����ڿ��Ԍ��F(xi��n)�������w�ď�����L��׃�ε��(q��)������ʾ�������ҿ��Y(ji��)�����P(gu��n)��������(q��)�����Y(ji��)�ς��к���̖��ݔ���ܵ������������ԓ�C�����Y(ji��)�˸��N�(q��)�����ă�(y��u)ȱ�c�Լ�����(zh��n)���������Ԍ��F(xi��n)�����Ť�D(zhu��n)�(q��)�ӵIJ�ͬ��ʽ����ͬ�IJ����Լ������������Ƅ����w���O(sh��)Ӌ���Լ������(q��)�ӺБ�(y��ng)���ܵĶ���(q��)�����Ę�(g��u)�졣

1���w�S�˹�����
���������Y(ji��)��(g��u)���w�S�˹��������ͨ�^���w�S������a(ch��n)�������Ť�D(zhu��n)�(q��)�ӣ�����ԓ�����w�S�P�@�ɏ��ɠ�t������������s�(q��)�ӵ��г̡�ԓ�������ȿ��Y(ji��)���w�S�˹�������(q��)�әC�ƣ��������e��ӑՓ��ͨ�^��ͬ�̼�������ᡢ�܄����ջ�B��늻��W(xu��)����̼��ȣ��(q��)�ӵ��w�S�(q��)������
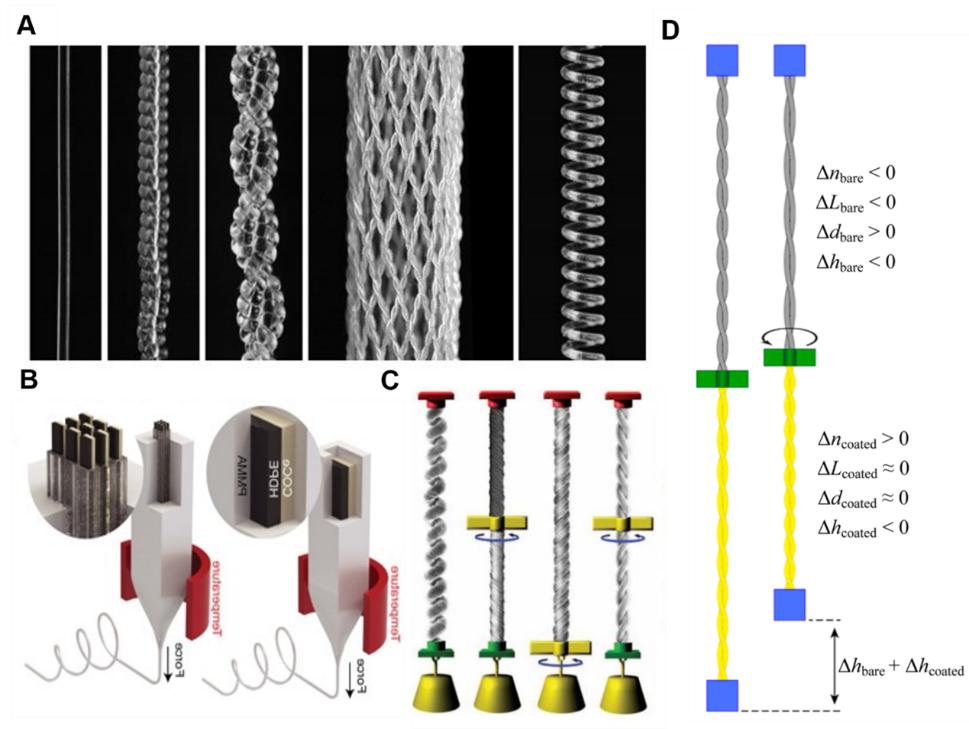
������Û�(q��)�ӵļ����w�S�˹����⡣ �DA�������w�S�˹����⼰��ǰ�w����6,6�νz�Ĺ�W(xu��)�D�DB����(q��)���p��늾�Ƭ�w�S�˹�����ğ������^�̡��DC�����������Ť�D(zhu��n)�ӵ������w�S�˹�����ĽY(ji��)��(g��u)�������ҷքe����s�(q��)�ӵ�Ť�D(zhu��n)�̶������w�S������Ť�D(zhu��n)�(q��)�ӵ�Ť�D(zhu��n)�̶������w�S��������Ť�D(zhu��n)�(q��)�ӵķǹ̶������w�S���Լ����������gŤ�D(zhu��n)�(q��)�ӵ��w�S���DD���⁺Ͻ�z�˹�����Ĺ����C��ʾ��D���w�S�ײ��Sɫ���֞�僽���⁺Ͻ�z��
2���Π�ӛ���߷���
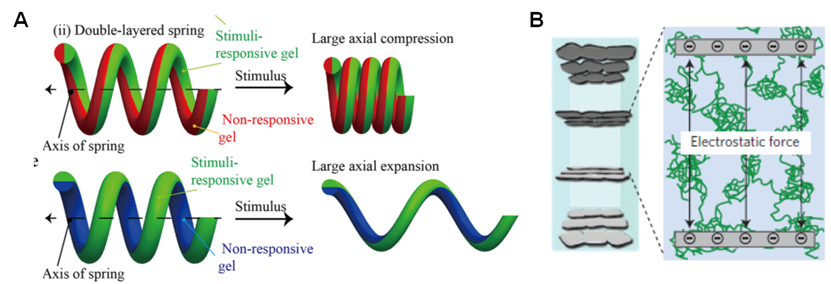
�Π�ӛ���߷������(q��)������һ���Ҫ�ĽM�ɲ��֣������@ʾ�������Ť�D(zhu��n)�(q��)�ӡ�ͨ�^�A(y��)׃�μ����ع̶��ۺ���朣������O(sh��)���ۺ���ĕ��r�Π����ʹ�ۺ�������¼���Π�֏�(f��)��׃��ǰ���Π�Π�ӛ���߷��ӿ����@ʾ������p���(q��)�ӣ����w��rȡ�Q�ڲ�ͬ�Y(ji��)��(g��u)�O(sh��)Ӌ�a(ch��n)���Ŀ������Ľ�(li��n)�c��

���Π�ӛ���߷��Ӽ������˹������еđ�(y��ng)�á� �DA���ɃɷN���в�ͬ���ڜضȵľۺ��(g��u)�ɵ�������(li��n)�Π�ӛ���߷��ӡ��DB�����cPEVA(��(li��n)��������ϩ��)���Π�ӛ���߷��Ӿ��Ќ����ڜضȷ����������ṩ�ݶȽ�(li��n)���DC����PCL(�ۼ���(n��i)��)��PTMEG(���ā����Ѷ���)��(g��u)���ľ��л����W(w��ng)�j(lu��)���Π�ӛ���߷��ӡ�
3����늏����w�(q��)����
��늏����w�(q��)������һ�N��늻��Ծۺ��ﱡĤ��(g��u)�ɵ��(q��)����������׃���ٶȿ졢�(q��)�ӑ�(y��ng)׃���p��ȃ�(y��u)�ݣ���ܛ�w�C�����I(l��ng)�������V���đ�(y��ng)��ǰ����ͨ�^�ڽ�늾ۺ��ﱡĤ�ɂ�(c��)��늘O��ʩ��늉������o�����������������Ĥ��ȷ��s��ͬ�rĤ�M��ߴ����ѯB���Ӿۺ��ﱡĤ��ʹ�ùܠ�Y(ji��)��(g��u)��������݁���Y(ji��)��(g��u)���ԷŴ��(q��)���г̡����F(xi��n)��s�(q��)�ӣ����ṩ�^����(q��)������

�������Ť�D(zhu��n)�(q��)�ӵĽ�늏����w�(q��)������ �DA����S�A(y��)��(y��ng)�����֬��Ĥ�ľ����(q��)��ʾ��D���DB�錢�A(y��)����ı�Ĥ�������������S��ʾ��D��ԓĤ���S�(q��)���L���S푑�(y��ng)늉���׃����׃�����DC��ܠ��늏����w�(q��)�����Ć������졣�DD��CNT@rubber@CNT@fiber��늏����wŤ�D(zhu��n)�(q��)������ʾ��D����Ť�D(zhu��n)�(q��)�ӡ������(q��)���Լ��(q��)���ٶ��c�����ܶȵ��P(gu��n)ϵ���DE��ѯB�Ķ��ӽ�늏����w�(q��)������
4��ˮ���z����
ˮ���z������ܛ�����c��ܛ�w�C���ˑ�(y��ng)���о��о�ǰ��������һ�N��Ҫ�Ĵ̼�푑�(y��ng)���ϣ���������ضȡ�pH���ⲿ�̼��®a(ch��n)���Π�׃�����@�N��׃�����ھۺ���朵��ΑB(t��i)׃����(d��o)�����܄��е��ܽ�ȸ�׃������ġ�������о��l(f��)�F(xi��n)��������͵Ĵ̼��������⡢�܄��ʹň�Ҳ��ʹˮ���z�a(ch��n)���(q��)�ӡ�
����푑�(y��ng)�������Ť�D(zhu��n)ˮ���z�(q��)������ �DA�����ڼӟ��(q��)�ӵ��p��PNIPAM-PAA/ SA����(N-��������ϩ����)-�۱�ϩ��/�������c�������w�S��Ȧ��ʾ��D���ɷքe���F(xi��n)�տs�����L�(q��)�ӡ��DB��{��Ƭ֮�g���o�������ʾ��D��
5��Һ���߷���
Һ���߷�����һ�N��Ҫ���(q��)������Ҳ������������Ť�D(zhu��n)�(q��)�ӣ��@��ͨ�^�ڟ����(q��)�ӕr���������D(zhu��n)׃?y��u)����ͬ�����팍�F(xi��n)�ġ��(q��)��ǰͨ�^��N��ʽ����������ȡ����ȡ��ȣ���Һ���߷���ǰ�w�M�мӹ������Ԍ��F(xi��n)Һ���߷��ӵğ�/���(q��)�ӵ���s��Ť�D(zhu��n)��Һ���߷���߀�@ʾ��������Ϳ�����ӣ�ȡ�Q���Ƿ�����(q��)�����g�������Ɖĵ�������(li��n)�W(w��ng)�j(lu��)��
�������D(zhu��n)����s��Һ���߷����(q��)������ �DA�������νY(ji��)��(g��u)��Һ�������wĤ�M�ɵĹܠ��(q��)�������(q��)��ʾ��D���DB����Һ�������wīˮ��ֱ���Ƃ�Һ�������w���ϵ�ʾ��D���DC�錦Һ�������wǰ�wͬ�r�M�С����ӡ��͡�ȡ���ԫ@�þ��Џ�(f��)�s3D�Y(ji��)��(g��u)���(q��)��׃�ε�Һ�������w�(q��)������
6����(d��o)늾ۺ���
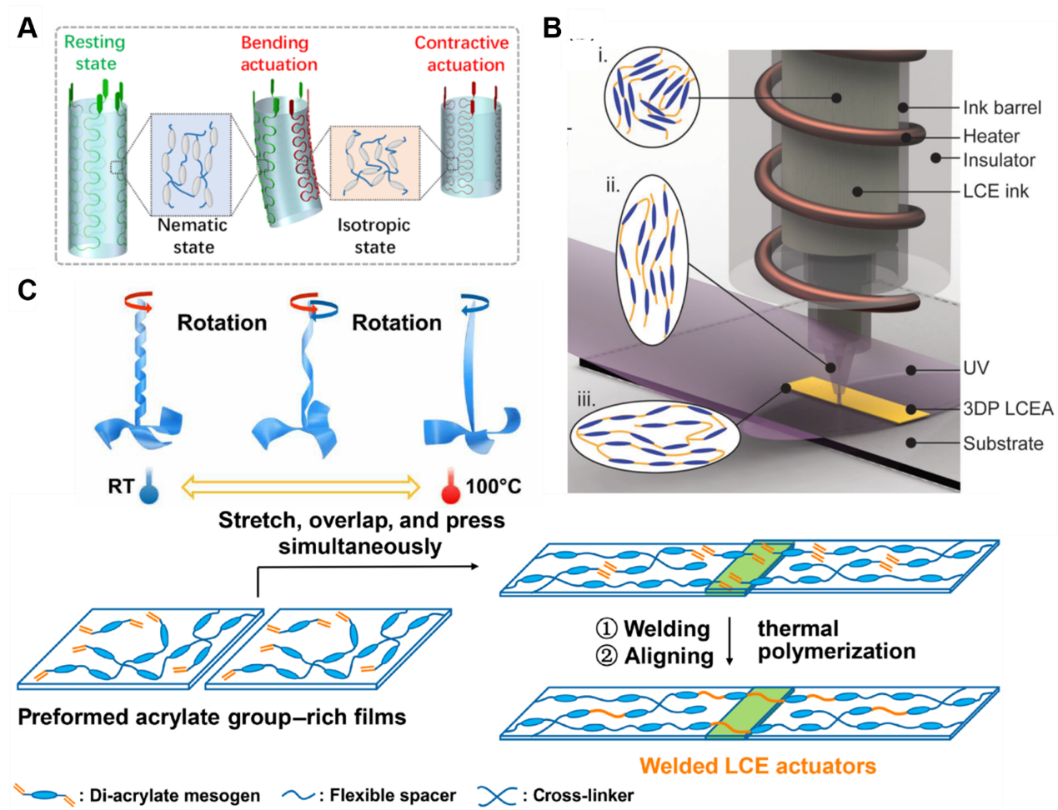
��(d��o)늾ۺ����������늻��W(xu��)�(q��)��������(d��ng)�o�ۺ���ʩ��늉��r����չ�F(xi��n)����������L�(q��)���О飬��(d��ng)�Ƴ�늉��r�ֿ��Ի֏�(f��)ԭ�ʹ�ò�ͬ��ͺͽY(ji��)��(g��u)�Č�(d��o)늾ۺ�����������(q��)�������(q��)���г̣��(q��)������������������(d��o)늾ۺ����w�SҲ�����Á��O(sh��)Ӌ�ɴ������˹����⼏��Ʒ��
����(d��o)늾ۺ����(q��)������ �DA�錧(d��o)늾ۺ����әC�Ƶ�ʾ��D���DB��PPY / DBS��������/ʮ����������ᣩ�w�S�(q��)������߀ԭ�B(t��i)�������B(t��i)֮�g������Û���տs��ʾ��D���DC�錧(d��o)늿����(q��)�����ĈDʾ�Լ�ͨ�^�ܗU������ؓ�d�đ�(y��ng)�á�ԓ����Ʒ����Ϳ�Ќ�(d��o)늾ۺ�����w�S�ؼ����Ƴɵġ�
7����Ȼ����
���˺ϳɲ��ϣ�һЩ��Ȼ�������ܵ��ⲿ�̼��ĕr����Ҫ�ǝ��Ӱ푣�Ҳ���Ԯa(ch��n)�������Ť�D(zhu��n)�(q��)�ӣ�����֩��z���Q�z�ȡ�����֩��z���f��Ť�D(zhu��n)�(q��)����ه����Ȼ�w�S���σ�(n��i)����Ť�D(zhu��n)�Y(ji��)��(g��u)���c��ͬ�r��߀���F(xi��n)������Ͳ��������s�(q��)�ӡ�֩��z��¶�ڝ���п����^�쵽������ij��տs�F(xi��n)��ͬ�r������ˮ����ɵ��w�e��ÛҲ�ɮa(ch��n)�������(q��)�ӡ�����֩��z�ġ���-Һ���^��Ч��(y��ng)�����O(sh��)Ӌһ�N�����(q��)�ӣ�֩��z���@���^���Е���Һ���Џ������տs�ɾ�Ȧ��
8������(q��)����
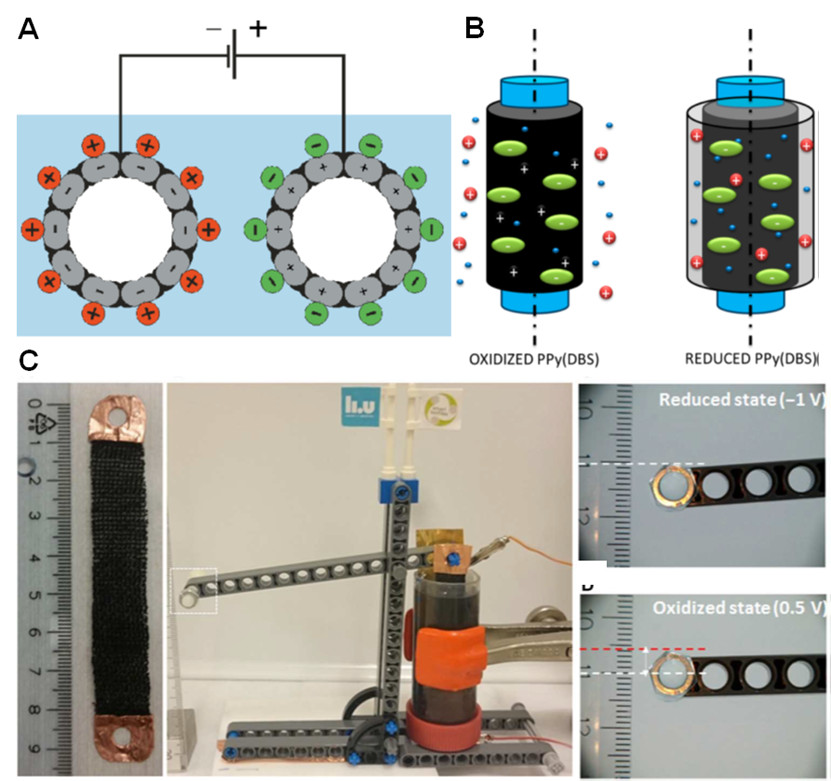
�������@һ���ֿ��Y(ji��)���܉�O(ji��n)�y��׃�r׃�δ�С�Ķ���(q��)�������Mչ������͏����(q��)�����������c��(y��ng)׃������������һ��ͨ�^�Б�(y��ng)��������ݵĴ�С�y���(q��)�ӑ�(y��ng)׃���(q��)�Ӯa(ch��n)������׃��׃�ˑ�(y��ng)׃����������������ݣ��Ķ���׃ݔ�������̖�����F(xi��n)�y����

�������ˑ�(y��ng)׃�Б�(y��ng)���ܵĶ���(q��)������ �DA��ʹ�ÿ������CNT@rubber@CNT@fiber����͑�(y��ng)׃���������y���߷��������w�S�˹�����đ�(y��ng)׃��ʾ��D���DB����ڼ����Ĵ�푑�(y��ng)�(q��)������ʾ��D���DC����(q��)�Ӷ�����ʽgraphite/ CNT / PVDF / PDG��ʯī/̼�{��/��ƫ����ϩ/�۶�Ͱ�߀ԭ����ʯīϩ����Ĥ�(q��)������ʾ��D���DD��ʯīϩ�ܾW(w��ng)�����ԸБ�(y��ng)�x�������(q��)������ʾ��D���DE�����(q��)�ӵĆΌ�����ʯīϩ�(q��)������ʾ��D���������ڑ�(y��ng)׃���е�߀ԭ����ʯīϩ��ͨ�^����߀ԭ����ʯīϩ�õ���
���������һ������߀�e���f���������Ť�D(zhu��n)�˹�������δ���Ŀ��ܑ�(y��ng)�ã�������Á��e�����w���c����������P(gu��n)��(ji��)�B�ӡ� ���⣬�˹�����߀���������\ݔ�ͻ��Һ�w�������l(f��)늙C���������ԓ�C���������x��ͨ�^��W(xu��)���о������F(xi��n)��ͬ��͵��(q��)�������ṩ����Ŀ��ܡ�
ԭ��朽ӣ�https://doi.org/10.1002/adfm.202007437
- �Ї��ƴ����d�����ڈFꠡ�ACS Nano�������пɾS������׃�κͿɾ��̴��(q��)�Π�֏�(f��)����푑�(y��ng)ܛ�(q��)���� 2023-12-05
- �㽭��W(xu��)�w�q���ڈFꠡ�Nat. Commun.����׃��ģʽ�ɾ��̵ĸ���ˮ���zܛ�(q��)���� 2023-11-26
- ����炐�ȁ���W(xu��)���h���ڈFꠡ�Mater. Horiz.�����w�S��3D��ӡ��ͻ�� - ������Ϣ���ܼ���ܛ�(q��)�����Į��|(zh��)�Y(ji��)��(g��u)ˮ���z 2023-04-24
- ���A��W(xu��)���ҏ��n�}�M��Adv. Mater.�����_�l(f��)Һ�������w���D(zhu��n)���� 2021-12-31
- �칤�Ѭ|�����n�}�M Macromolecules: ���æ�-���{(di��o)���Π�ӛ���߷���ˮ���z����׃�ٶ� 2024-08-29
- �L����Ч | ���Ͻ����ܽB�����ڈF��\�в�ʿ������Tʿ - ���ϡ������t(y��)�W(xu��)���� 2023-09-23
- ���������R���F� Nat. Commun.���侎�̻Ҷ�4D��ӡ 2023-09-17
�\���P(gu��n)ע�߷��ӿƼ�

- �������C����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �������S���e���ڈF� Angew...
- ���ϴ�W(xu��)����/�S�M�F� AFM:...
- ���T��W(xu��)�������n�}�M Sci. ...
- �A���r(n��ng)�������/����...
- ��h�������l(w��i)�ֽ��ڡ���P��...
- ��ʿ�m��W(xu��)�������F� Adv. ...
- ��h��W(xu��)�������ڈFꠡ�Adv....
- ��������Rͬ�c���ڈFꠡ�Sc...
- �Ϲ����غ������đ�Ƽ/�п�...
- ���T��W(xu��)�ܱ���F� ACS Nan...
- �V����W(xu��)���P���ڈF� CEJ...