�㽭��W�w�q���ڈFꠡ�Nat. Commun.����׃��ģʽ�ɾ��̵ĸ���ˮ���zܛ����
�̼�푑�ˮ���z��һ��͵�׃��ܛ���ϣ��܉�푑���ͬ�ĭh���̼�����׃���z�Ȳ��ĝB������ͨ�^��Û/ȥ��Û���F����ĺ��^�w�e׃�����������ԓ����ܲ��������S����푑���ͺ�׃��ģʽ�����˹����⡢ˎ���f�͡��M�����B�ȑ����I���ܵ��V���Pע��Ȼ���F�����z��ه�ڝB���ƄӵĂ��|�Uɢ�^������׃�Σ�ԓ�C�Əĸ�Դ����������푑��ٶȣ�ͨ����Ҫ��犵���С�r�������һ����ѭ�h����һ���棬ˮ���z��׃��ģʽ�ںϳ��Ƃ���_�����o���Mһ����׃���y���m�����s��׃�Č��H���È�����

ᘌ��������}���㽭��W�w�q���ڈFꠈ����һ�߸�푑��l�ʺͿɾ�������������ˮ���zܛ���������ڼt������F��ģ�B���l�ӡ�ԓ�ɹ��ԡ�High speed underwater hydrogel robots with programmable motions powered by light�����}�l����Nature Communications�ϡ�Փ�ĵĵ�һ���ߞ��߳�����ʿ��ͨӍ���ߞ��w�q������ԓ�����õ��ˇ������c�аlӋ������Ȼ�ƌW�����֧�֡�
ˮ���zǰ�Һ�M����D 1a ��ʾ��NIPAM ���w�c�����サ�� (BISS) �ں��о���ϩ�� (PVA) ��ˮ��Һ�оۺϡ��ɴ˵õ���ˮ���z�Mһ���c�X�x�ӽ��õ���ʼˮ���z��Ʒ����Ʒ�Ƃ��ˮ���z�ܵ��������ðl��׃�β���UV��������ԓ�^�̷Q�顰����-�Cе���̡���ԓPNIPAM-BISS���z��Ʒ���v���̺��p���I�l�����Q���Ō���ԭʼ�Π���ø�׃�����Π�D 1b��������ˮ���z�W�j�еĜ����߷���朶�������������ȡ�����С����ܵ��ضȴ̼��r������朶Ε�����ȡ����l������ġ����F-���w�������ГQ���Ӻ��^����׃�Σ��D1c����
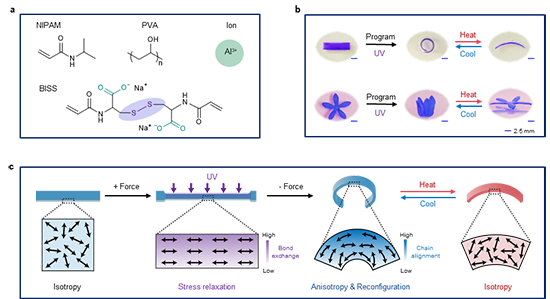
�D1 PNIPAM-BISS������ˮ���z�����ķ��Ә��ɼ����̙C������a��ˮ���zǰ�Һ�ĽM�֣���b��ˮ���z���̺��^չʾ����c��ˮ���z�����^�̼��C��ʾ��
ԓ�F�ָ�����ٿ��������z�W�j�OӋԭ�tͨ����Ҫ�M�����ɂ��l��: ��1���W�j������Ч�ĸ߷���朶�ȡ��C�ƣ���2���߷��ӾW�j�߂䘋���D׃�C�����ڱ�ˮ���z�wϵ�OӋ�У��ӑB�p���I���Q�ṩ�˸߷���ȡ��C�ƣ���PNIPAM朶Ό��F�˘�����ГQ��ԓ�OӋԭ����δ�������ձ��ƏV������ˮ���z�wϵ�������M���@�ɂ��țQ�l���⣬�x�ӽ���PVAͬ������ȱ�١��X�x�����ڸ��Ʋ��ϵęCе���ܣ���tˮ���z�ھ����^���Пo�������^��ęCе׃�Ρ�PVA������t���Խ���ˮͨ���������L���Ӯa���IJ�Ҏ�t׃�Ρ��ڴ˻��A�ϣ�ԓ�F��Mһ��̽����Ӱ����z�ӱ��F�����P�������D2����ˮ���z�ĺ��^׃�μ����S���p���I����BISS�������ʬF������p��څ�ݡ���ԭ�����ڮ�BISS�����^�͕r���Qλ�c�^�٣�朶�ȡ��̶ȵ͡�����һ���棬�^�ߵľW�j���ܶ�ͬ�ӕ���K�ӑB�I���Q��ƽ����ߣ�40wt%BISS��������ѽ������������⣬���Օr�g���x�ӷN�PVA�����ȶ���Ӱ����z���ӱ��F���ڃ��������P������ԓ���z������7��ѭ�h�б���75��ķ����ӡ�
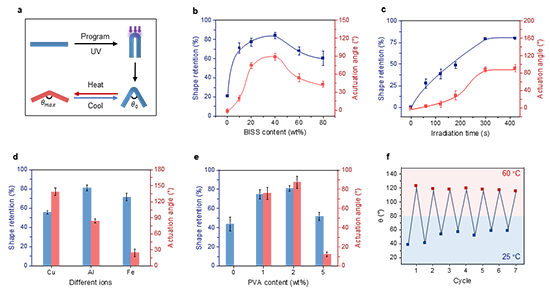
�D2 PNIPAM-BISSˮ���z�Π��ؘ����ӵ�Ӱ����ء�
���������о���ԓ���z��ͨ�^ ������-�Cе�����̷�ʽ���F��ͬ���Π��ؘ�����ģʽ�Ķ��x���������ڹ��վ��и߶ȵĿ��g�x���ԣ�ԓ���̷�ʽ����ͨ�^�x�����ع���ֲ����x����׃�Θ�Ʒ���Ӆ^���Mһ���������z��׃�ε����ɶȣ��D3����
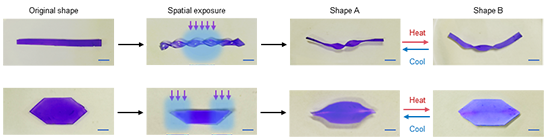
�D3 ���g�x���Ծ���PNIPAM-BISS������ˮ���z
���F�Π�ɾ��̺�ԓ�F��Pע��ԓ���z�wϵ������֮̎������չ�F�������ٵ�푑����ʣ��h�����J֪�еĂ��y����׃�����z�wϵ����ˣ�ԓ�Fꠌ���ȡ�̵�PNIPAM-BISS���z�����c������ͬ���ϵ�δ���̵��p�ӽY�������M�����ٶȌ��ȡ��Y���������p�ӽY��������׃�������c����Û׃������һ�£�һ����ѭ�h��Ҫ���v��ʮ��犣��D4a���������̺�������׃���ڔ�ʮ�뼴����ɣ��h�h����ˮ���z��Û׃�����ʣ��D4b�����ɴ��Ɣ࣬���̺����z������׃�ΙC���c���y�Ĵ̼�׃�����z��ȫ��ͬ���о��F��Ɯy�������׃�ΙC����D4b������ʾ�����̺��ˮ���z�W�j���γ��˷����ȡ��Y�����ӟ�/��s�^����ȡ���PNIPAM �߷���朶Ε�����ȡ����l�����昋��׃�����M���������^��׃��PNIPAM朶εĘ���׃���ɂ�����ƣ����Q���˺��^׃�����ʡ���Ӌ�㣬ԓ���z�wϵ�Ă��������r�g��10-1 ~101 s�^�g�ȣ������|�����r�g�t�L�_103~105 s���c���Y������һ�£��Mһ��֧����������Ă����әC�ơ������ڴ˙C����ԓ���z��푑��ٶ��������Y����������Ƶ�Ӱ푴���pС���ɼ���l�Ӽ�������ݔ�����o������Y���ߴ硣�Mһ������̼�w�����s��ˮ���z�Ќ��F�t����ӟᡣ�������������£�����ˮ���z�܉��� 0.3 Hz �� 1.7 Hz ���l�ʌ��F������ʎ���D5����
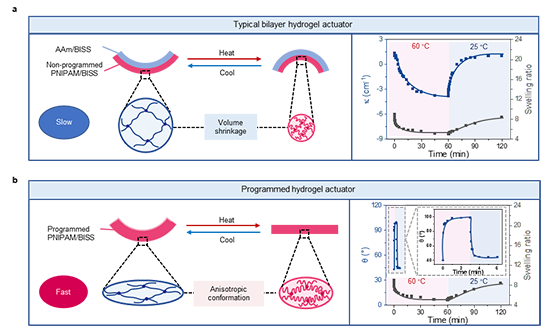
�D4 ���y���z������a����PNIPAM-BISS���z����(b)׃�ΙC�����ٶȌ��ȡ�

�D5 ���l�t������
�Y�Ϲ���-�Cе�����ֶΣ�ͬһˮ���z���������؏;����Ԉ��в�ͬ�Ŀ�����ģʽ�����ÿ��g�x���Լt������䣬ԓ�F�������һ�N����ˮ���z��Ӿ�C���ˣ����B�m�\����֫�w�Ŀ�����ʎ�[���ӣ��D6�� ���¾��̺���Ӿ��ͨ�^�ɗl�Ƚ������䣬׃���������е��C���ˣ��D6�У��� �ٴ��ؾ��̺����ЙC���˿����Mһ�������̞����D�C���˶����F��r����D���D6������ԓˮ���z�wϵ�Ŀ���푑��C���⾎�������ڶ�ģ�B����ˮ�C���˵��_�l��չ�F�������ݣ����˹���ͨ�^Ŀǰ��֪�Ă��yˮ���z�����y�Ԍ��F��ԓ�F����ţ��˹�������δ�����͵�ˮ���z�C���ˎ����µ��`�к͆��l��
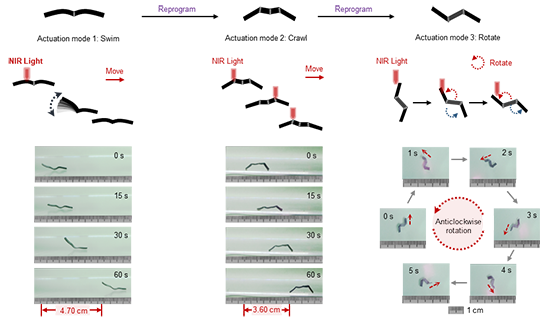


�D6 ����ˮ���z��Ӿ�C���ˣ������ЙC���ˣ��У������D�C���ˣ��ң�
ԭ��朽ӣ�https://www.nature.com/articles/s41467-023-43576-6
