ܛ�w�C�����܉��m����ͬ�ķǽY�����h�������F�c�����ȫ�ؽ�����Ŀǰ��ܛ�C������Ҫ�����ֹ��b�乤ˇ���졣���췽���ľ����Ԍ������a���y�������˲����x���������y�ԫ@�Ï��s�������ܣ����������x��C���˸�֪�������������ˡ����֮�£�3D��ӡ���������켼�g�����Ի��ڔ���ģ���ԄӜʴ_�،��OӋ˼���D������s������Ķ��@��������aЧ�ʺ������`���ԡ���ˣ�3D��ӡ������ܛ�w�C���˵�����x��֮һ����������Ԍ��F���ܲ��ϵľ��_�ӹ���Ҳ����4D��ӡ���g��4D��ӡ���Ԍ����ܲ��ϼӹ��ɾ��и��N�̼�푑��О�ĄӑB�Y�������˺��ε�׃���⣬���и�֪�������m���Ե�4D��ӡ����ܛ�w�C���˸�����������Ҳ����ͨ���f���˹����ܣ�AI, Artificial Intelligence������ͨ�^4D��ӡֱ�ӫ@������ܛ�w�C������Ȼ��һ���������

ʾ��D
���գ�����W���όWԺ�₥�����Fꠈ����һ�N�߂������Є��������|�X��׃��4D��ӡܛ�w�C���ˣ�ԓ�C������һ�δ�ӡ���ͺ��П��o�s���L���������o���κ��������m�ӹ����C���˵ĝL�ӷ������������ٶȺͷ����ͨ�^��׃�Π�ͳߴ��M���{������D1��ʾ����������160��ğ��_�ϕr����ӡ�ľ��Θ�Ʒ׃�Ξ������ܠ���ڼӟ�����Ԅ��_ʼ�L�ӡ��{����Ʒ�Ĵ�С���Ը�׃�C���˵ĝL���ٶȡ����L�ӵķ����������ܵ����ʷ�����ƣ������p�ɸ�׃��
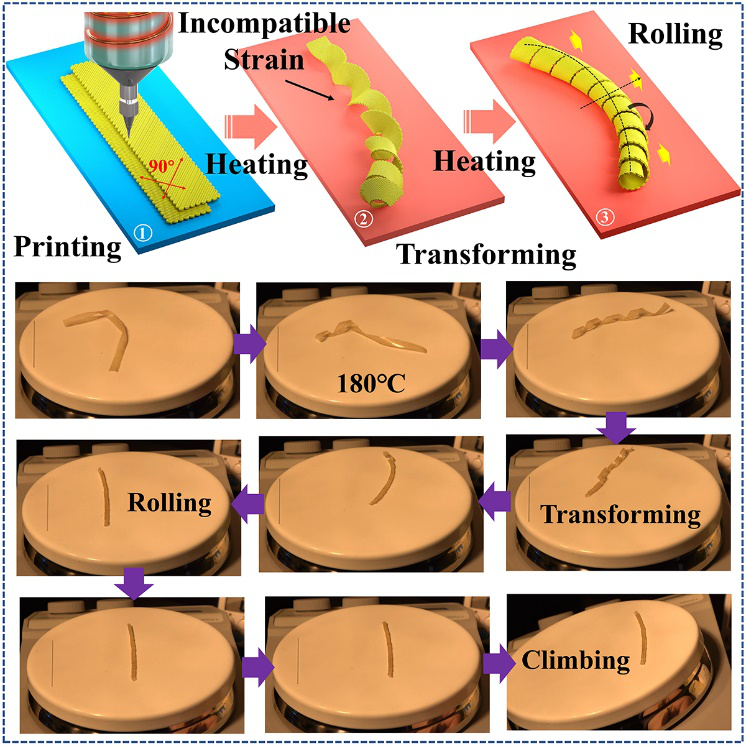
�D1. 4D��ӡܛ�w�C��������׃�μ��L���^�̡�

�D2. �C���������L�Ӽ������^�̡�
��D2��ʾ�����ӟ��ˮƽ�r����Ʒ�Լs48 cm/min���ٶȳ����������ʷ���L�ӡ�������҂ȱ�����r���҂��^�쵽���M�ܲ������ѽ����£���Ʒ������б�����ϝL�ӡ����Կ������ܠ�C���˵��������^�����Ԅӵģ��o���׃�h�����ء����֮�£�����ȱ�������ԣ����������ܛ�w�C���˟o��Ó�x���ӿ��ơ���ˣ��@�N�C���˵�һ����Ҫ�������������ӣ�ʹ�C�����܉���Ó�x�˹����Ƶ���r������΄ա������ڲ��ϺͽY������ܛ�ԣ��ܠ�C���˵ğo�s���\�Ӻ����ױ���׃����D3A��ʾ���^�L�ӱ��ĝL���ٶȱ��^�̘ӱ��죬��D3Bչʾ��һ�������ܱ�ِ��������10 cm�L��Ʒ�����L���ٶȿ����_��48 cm/min�������ԏĺ����p�ɵ��s��7 cm�L�Ę�Ʒ�����ژ�Ʒ�@ʾ��һ����𤏗���Ժ��ஔ��ĝL������������Ʒ��һ���Ƕȷ����ڃAб�ļӟ���ϕr����Ʒ��Ȼ�������ϝL�ӣ��D3D������Ʒ�ĝL���ٶ��S���Ƕȵ����Ӷ����ͣ����Ҙ�Ʒ�^�m������б���ϣ�ֱ���ٶȽ��͵�0��Ȼ����䡣��D3E��ʾ�����������^���^�L�Ę�Ʒ�������^��ĽǶ����¡��@�N��������ʹܛ�C�����܉��m�����s�ĵ��Ρ�
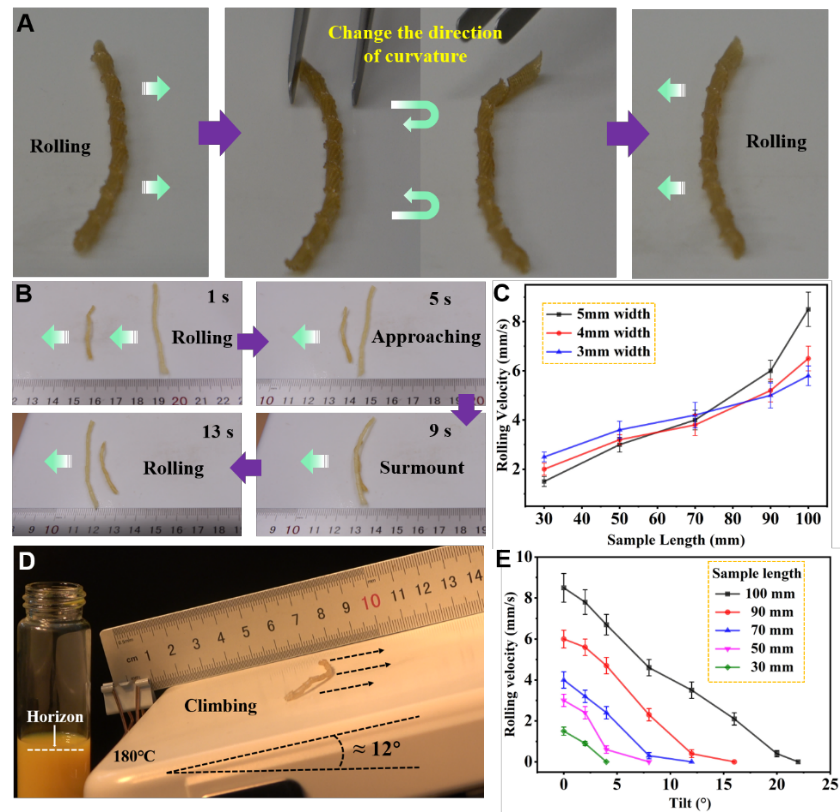
�D3. 4D��ӡܛ�w�C���˵ĝL���\��������
�C����֪���˹������I���һ����Ҫ������ҕ�X�� �X���|�X��������֪�����ęC���˿���ģ�M��ģ������О顣ͨ��Ҫ���F�˹����ܣ���ʹ����εĸ�֪������Ҳ��Ҫ��C�����м��ɸ��N���s��Ԫ�����͂�������Ŀǰ��ܛ�w�C���ˣ��e���ɆηN���ϽM�ɵ�ܛ�w�C���ˣ������˹����ܵĵ�·���f���L���D�y�����ڱ��о��е�ܛ�w�C���˶��ԣ����������AͲ�����ʷ�����ƝL�ӷ��������ʹ���@�Nܛ�w�C������������x�|�ǵ��|�X��֪���������܉�̽�yǰ����·�ϵ��ϵK������ϵK��ĸߵ͌��F��Խ���۷������О�W���w�F��һ���������ԡ��������ܵĿ��ĈAͲ��؛���b�d�ṩ�˿��g�������b�d؛�������������_�C����������40������ˣ�ԓ�C���˿����ژO�˸ߜؗl���µ�؛���\ݔ������̽�y��
�D4. ��Խ�^���ϵK��

�D5. �����^���ϵK���^���ء�
ԓ�ɹ���Cell ����������피��ڿ�Matter�l�����}Ŀ�顰4D Printed untethered self-propelling soft robot with tactile perception: rolling, racing, and exploring�������µ�һ���ߞ�����W���όWԺ��ʿ�о������w���₥�����鱾��ͨӍ���ߡ���������₥���ڈF������ܲ����I���_չ��һϵ�Є������о����������ڳɹ���Ҫ�У�Mater. Horiz., 2021,8, 2475-2484; J. Mater. Chem. A, 2021,9, 875-883; Progress in Materials Science, 2021, 115, 100702; ACS Applied Materials & Interfaces, 2020, 12, 15657-15666��Adv. Mater., 2021, 2004754���ȡ�
Փ��朽ӣ�https://www.cell.com/matter/fulltext/S2590-2385(21)00408-2
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ������܊��/�܊μ���ڈF� Adv. Sci.����ܭh����֬�о������Mչ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ��������ʎ���������ܛ�w�C���� 2024-10-26
- �����i���ڡ���Ԭ䅸�����/����γ������ Adv. Sci.���ӑB�I���������������w��4D��ӡ - ���������������t�W�C�� 2025-06-10
- �A�|�����R�J���ڈF� Nat. Commun.����̻���4D��ӡ�^���Ҝ����ҕ�� 2025-05-08
- �ۿƴV�ݣ������n�}�M�\�в�ʿ�� - �߷��ӡ����W�����ϡ��Cе��������2025���^��2026�괺����W�� 2025-03-08
- ���T��W�������n�}�M Sci. Adv.��ͬ�ı�ģ�巨�Ƃ���з����h���w�S�Y���ď��gˮ���z 2025-06-25
