��ӿƼ���W������������W�Fꠡ�Adv. Mater.����3D��ӡ����ܛ�w�C���ˌ��FҺ�ε��`��ٿv���w���\��
��ܛ�w�C���˿������Ӹ�׃�������Π��Ԍ��F�����`����\�ӺͲ���,���ʮ�����L��С�ߴ��ҿ��g���ĭh���й������@һ���صă���ʹ���������V�����\���������t�W�I������Ŀǰ����ܛ�w�C���������еķ���֮һ�������Ӿ߂�����h�̟o�����ơ�푑����������ڌ��F�ă��ݡ�Ȼ���������켼�g���ޣ�Ŀǰ���������ܛ�w�C�������ɷ�ģ�T�죬ͨ����Ҫ�������ĕr���������E�Ҿ�����2D�Y����������ܺ����҆�һ��
3D��ӡ���g������@�N�����ṩ�˿��ܡ����w��̻�3D��ӡ���g��Vat Photopolyerization�����QVP�����и߾��ȡ��߷ֱ��ʡ����ٳ��͵ȃ��c��ͨ�^���w��̻����g��3D��ӡ�����˴����w�����ϵď��Ԙ�֬�����Ԍ��F�ʹ���ܛ�w�C���˵Ŀ������w���͡�Ȼ������ͨ�����w��̻�ƽ�_�ϣ����ʹ�ü{�׳߶ȵĴ����w�����ϣ������w��������֬���|�Ĺ�������ɺܴ�ĸɔ_�����ʹ�������^����׳߶ȴ����w�����ϣ��mȻ�������ոɔ_�^С�����Ǵ����w�������ٳ����������ײ����@�����´��������ڴ�ӡ�����еķֲ��������������´�ӡ�o����ɡ���ˣ������ǰ���о�ֻʹ�ü{�״����w������������ϣ�ͬ�r�����^�͵��d����<1%) ���_�����ԏͺϲ����܉���ͣ�Ȼ������ϴ�ӡ���͙C���˲��ܮa����Ĵ����������ͽY������׃���@Щ�C���˴��ֻ�܌��F�����Ƅӣ�ͨ��Ҳ��Ҫ��Һ�w�h���У�����Һ�w�ĝ��������c������p���\�ӵ�������
���������һ�N���͵�ѭ�h���w��̻�3D��ӡ���g��Circulating Vat Photopolymerization, ���QCVP)����Q�������}��CVP����ͨ���w��̻�ƽ�_��������һ�ט�֬ѭ�hϵ�y��ԓϵ�y�ڴ�ӡ�^�����ܲ���،����ԏͺϲ����M�л�ϣ��Ķ����C�w���ژ�֬�еľ���ֲ������İl�F������˴����w���IJ��Ϻͳߴ猦��̻�3D��ӡ�^�̵�Ӱ푣�Փ�C���J�F���w��SrFe12O19�������w������������ϵă�Խ�ԣ���������������ڴ��Ԙ�֬���d���ɸ��_30%��ͨ�^ʹ��CVP������չʾ�˸��Nһ�γ��͵�˨ϵ�ͷ�˨ϵ�ʹ���ܛ�w�C�����Լ���ͨ�^3D��׃�ٿvҺ�ε�������ͨ�^�������Ԅӻ����ƌ��F��ͬ�Ĵ���ܛ�w�C����ͨ���������ɹ���չʾ��ᘌ�̼��ùϩ�������ˎ�Եęz�y���@��Ŀǰ������͵Ĵ�����ܛ�w�C�����y�Ԍ��F�ġ�
CVP�ďͺϘ�֬ѭ�hϵ�y�����ƵĘ�֬�ۡ�ѭ�h�á��u���������Լ��B���õ�ܛ�ܽM�ɣ��D1a�����ڴ�ӡ���^���У�ѭ�h�ò���،���֬�۵ײ��Ĵ��ԏͺϘ�֬���뵽�u���������У������Ϻ�õ��Ĵ��ԏͺϘ�֬�ٴα������֬���У��Ķ��_�������ľ��|�ԡ�CVP����ӡ�Ę�Ʒ�ڴ�ӡ�����ϛ]���@ʾ�����@���ɫ׃�����dz������ر��������w�����ϵľ���ֲ����cCVP�෴��VP�Ę�Ʒ�S����ӡ���M�У��ɫ��u׃��ֱ�������@��������ӡ�^�����w�����������µģ��D1b������Ʒ�Ķ����M����ʾ��DҲ���������ԏͺϘ�֬������δ�������w�����ϵķֲ��ʹ�ӡ�^�����Ӱ푣��D1b����ͬ�r���cVP��Ʒ��ȣ�CVP��Ʒ�е��ܶȷֲ����D1c������һ�£��F��Fe�����J��Sr��Ԫ�صķֲ�䁝M������ҕ�^�]�����@�Ŀն����D1d�����@Щ�Mһ������CVP����Ч�ر��֏ͺϲ��ϵĸ߄��|�ȡ�
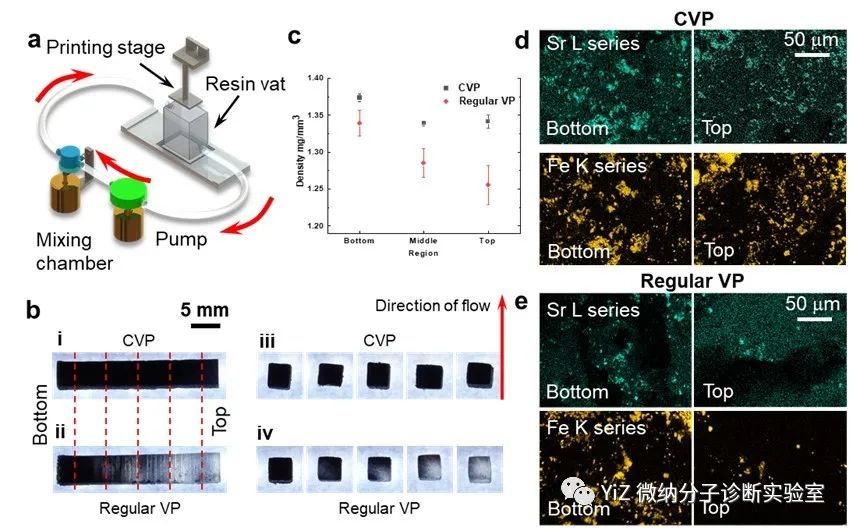
�D1��ѭ�h���w��̻���CVP��3D��ӡ���g��a) ��֬ѭ�hϵ�yʾ��D��b) ��ͨѭ�h���w��̻���VP���cCVP��ӡ�Ę�Ʒ���ȣ�Bottom�����@�������ȴ�ӡ��Top�����@��������ӡ��iii & iv �քe��i & ii ��̓�����ֵęM���棻c) b �И�Ʒ��ͬ��λ���ܶȌ��ȣ�d) b�И�ƷBottom �� Top ��λ���FԪ�أ�Fe�����JԪ�أ�Sr���ķֲ����ȡ�
�����w�����ϵij���Ч���c�����ӵ������ʘO���������Ŀǰ��ͨ��̻���ӡ���ԏͺϲ��ϵ��������w�����ό����ӵ�����ʹ�Ø�֬���ܵõ����������M�й̻����w���ij����t�����´����w�������ڏͺϲ����еķֲ������������о������N���õĴ����w�������C�����F��Fe3O4������F��NdFeB�����J�F���w��SrFe12O19�� �C����ӡ�^�̵�Ӱ푡��@���N���ϵ����չ��V�D�@ʾ���D2a������ͬ�d�������Ƴߴ����r�£��J�F���w�����ӵ�������������������J�F���w�����ڴ��ԏͺϘ�֬�б��ָߵ��d���������w���Ĵ�СҲ���P��Ҫ�����ӵ������������S���w����������������pС���D2b����Ȼ��������������Խ��Խ������Խ������������ٶ�Ҳ��Խ�죨�D2c�����C�Ϲ������c�������ԣ�3-6���J�F���w�����w�����䌦���ӱ��^�������������c�m�еij������ʣ����x�������m���Á���ӡ���ԏͺϲ��ϵ����ϡ���֬���������ϲ��ɱ���ĕ�����֬����׃���Ԯa��Ӱ푣��S�������d�������ӣ����ԏͺϘ�֬���F�����@�ļ���ϡ���F�D2d���D2e����Ȼ���@�NӰ푷dz�С��������Ӱ�CVP�Ĵ�ӡ���̡�CVP��ӡ�ďͺϲ����S�������d�������әCе������u�p�٣������ė���ģ��Ҳ��u�pС���D2f���D2g�����@������CVP�еĴ������ϲ�δ�c��֬�a�����W�I�Y�ϣ���������ֻ�ǿ��g�ϱ������ژ�֬�γɵľW���У�����������ռ���Ŀ��g�����˘�֮֬�g���B�ӣ��Ķ������˙Cе���ȡ��@һ���������ڴ���ܛ�w�C���˵����졣�������ϵ�����ͬ�rʹ�ô��ԏͺϲ��Ͼ߂���Ա����ôŻ������ԣ����N�d���ĴŜ��ؾ�Ҳ�@ʾ���D2h���S���d��������CVP�Ĵ��ԏͺϲ���չ�F��Խ��Խ�ߵ�ʣ��Ż����ȣ�����ԓ���Ϟ�Ӳ�Ų��ϡ�CVP�ǻ��ڂ��y�Ĺ�̻���ӡ���g��������Էdz����ٵء��`��ز����ڬF�е��̘I��ӡ�C�У����Ҳ���Ӱ푴�ӡ�C�ľ��ȣ������Á���ӡ�dz����s���ͽY���ҿ����ڴň����®a���������׃���D2 i~k����������չ�F��3D��ӡ���ԏͺϲ���չ�F���dz����õď����c�Ż����ԣ���ӡ�ĽY�������Ϳ��Ա��ň��ӣ�����dz��m���Á�����������ܛ�w�C���ˡ�
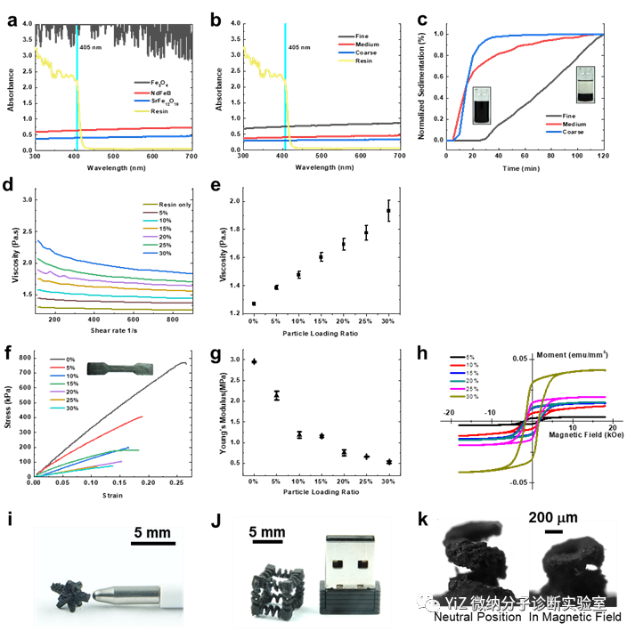
�D2��CVP�����Է���: a) ����ߴ���J�F���w��SrFe12O19���������F��Fe3O4������F��NdFeB���w�������չ��V��b)��ͬ�ߴ��J�F���w��SrFe12O19���w�������չ��V��c)��ͬ�ߴ��J�F���w��SrFe12O19���w���ژ�֬�е��½����ʣ�d)�ͺϘ�֬�ڲ�ͬ���������µ�ճ��;e)600~900 s-1��ƽ���������ʣ�f)��ͬ�����w��������Ʒ��CVP���đ�����׃�D��g)��ͬ�����w��������Ʒ��CVP���ė���ģ����h)��ͬ�����w��������Ʒ��CVP���ĴŜ��ؾ���i-k) CVP��ӡ���ͽY����k) ���ԏ��ɵľ�����300�ף��⏽��900�ס�
������ʾ����CVP����Ď���OӋ����Һ�βٿv��˨ϵ�ͷ�˨ϵ�ʹ���ܛ�w�C���ˡ���չʾ�ęC���˾�һ�����w�����Ҵ����w���d����(15%)�����Ĵ�ӡ�r�g��5~30������ң������Ƴ���ӡ�^���е�֧�νY����������Ҫ�~���ճ�ӡ��и�ȽM�b���E�����m�����ⲿ�ň����£����H���Ԍ��F�����Ƅӣ�߀������ɿ�����׃�����F4D��ӡ������׃3D��ӡ����
�ʹ���ܛ�w�Cеצ��צ�Ӳ����c������ұ����Y�����D3a���������F�����Cеצ�ײ��ĕr��צ�ӱ��������F���˕rצ�ӏ��_�������F�����ߕr��צ�������ď��Ԍ�ʹצ�ӏ�λ���˕rצ��̎���P�]��B�����y�ęCеצ���Á�ץȡ���w��Ʒ��Ȼ�������ĵęCеצ���渲�w��һ�ӳ���ˮͿ�ӕr���Cеצ���H�����Á�ץȡ���w��Ʒ���D3d��������Ҫ���ǿ����Á�ץȡҺ�Σ��D3b�������⣬ԓ�Cеצ߀�����Á��ں�liquid marble. Liquid marble ����Һ�εı��渲�w��һ���ɳ���ˮ�w���γɵ�Ĥ�������@��Ĥ�Ĵ��ڣ�ʹ��liquid marble֮�g���ںϷdz����y��Ŀǰ�������nj��ɂ�liquid marble��һ���ĽǶȸ�����ײ���@�N�����dz��������ƣ�liquid marble�����������_����һ�N������ʹ�ø߉�������늺ɵ��������ʹliquid marble���ںϣ������@��Ҫ��ǧ����늉�����������ȫ�¹ʡ����ĵęCеצ����ͬ�rץ���ɂ�liquid marble��ͨ�^�D���ķ�ʽ�����ںϣ��D3c�����dz��ĺ��θ�Ч��ԓ�Cеצ������_�ϽǶȞ�35�����_���ٶȞ�8.4��/s��ÿ��צ�ӿ����ṩ�s4.7mN����������ץ��3~50����Һ�κ�0.958g�Ĺ��w��Ʒ������1�f���_�Ϻ���������������
�D3������ܛ�w�Cеצ��a���Cеצ�Ĺ���ԭ����b���Cеצץȡ���Ƅ�Һ�Σ�c)�Cеצͬ�rץ���ɂ�marble,ͨ�^�D��ʹ֮�ںϣ�d���Cеצץȡ��ͨ�����w��
�ʹ���ܛ�wëë�x��ľ�R�C����������ͬ���\��ԭ������ëë�x�C���˞������D4c���������F����ëë�x�ĵײ��r����ʩ��һ��ָ����F����ď�����FT��FTˮƽ����ķ�����β�������^��ʹ�Ï��ɽY�����s��ͬ�r���^����鴹ֱ����ď��������a��������oĦ����ʹ���^�����ֲ��ӣ������F�������Ƴ��r�����ɽY���_ʼጷŏ��Ԅ��ܣ��^���cβ��ͬ�r�ܵ����ɵ�����������β�ͱ��^�����|���c���|��e��������oĦ����Ҳ��������β�ͱ��ֲ��ӣ����ɵ������˷��^��������oĦ����ʹ����ǰ�Ƅӡ�ͨ�^�����؏��������E���Ԍ��F�C������ǰ�Ƅӡ��@�ɂ��C���˵ı���Ҳ�����w��һ�ӳ���ˮͿ�ӣ�ʹ���������Ա�������ָ����·�����Ƅ�Һ��ǰ�M��ëë�x�C����ֻ�����Ƅ�һ��Һ�Σ��D4d������ľ�R�C���˿���ͬ�r�ƄӃɂ�Һ�Σ����F�Ľӽ��c�h�x���Էքeʹ��ľ�R�ĺ����cǰ���߄�һ��Һ�Ρ����ëë�x�C���˵�β�����̶�ס��߀�����Á���6.6m/s���ٶȌ�Һ�Ώ����ȥ���D4e����ëë�x�C���˵�ƽ��������2.86mm��20.4% �������L�ȣ��D4g����ľ�R�C���˵�ƽ��������2.81mm ��28.1%�������L�ȣ��D4h�������������Ƃ�Ĵ���ܛ�w�C���˵IJ�����s̎��15~29%�������L�ȣ����֮�£�ëë�x��ľ�R�C�����Ƿdz��Ѓ��ݵġ��M��ëë�x��β���cľ�R�C���˵ĺ��ȕ����p�ĺ��ˬF���@����Ӱ����w��ǰ�M������
�c������B�ęC���˲�ͬ���ʹ���ܛ�wˮĸ�C���ˣ��D4i������������J�F���w�ɱ����ôŻ������ԡ���ӡ��ɺ�ˮĸ�C���˱����ƵĊA�߹̶�ס��Ȼ�����1.1T�ľ���ň������ض��ķ����ϴŻ���ˮĸ�C�����DZ�һ����9��늴��F���M�ɵľ���ň������Ƶģ�20 mT�Ĵ�ֱ���ϴň���ʹˮĸ�C���˵��|�������\�ӣ�-8mT�Ĵ�ֱ���´ň���ʹ�|�������\�ӡ����@�ɷN�ň���5Hz���l�ʽ�����F�r���пյ�ˮĸ�C�������ܵ��ĸ������|���\�Ӯa����������ͬ����ʹ��ˮĸ�C������4.8mm/s���ٶ������΄ӡ�����ͬ�r߀չʾ������ɂ�����ˮ���Ԅ����\��ǰ�M���͙C���ˣ��~�ΙC�����c�����C���ˣ��D5�����~�ΙC����Ҳ����������ʎ�Ĵň����ӣ������������w��ˮ�������Ĵ�������~��΄ӣ��Ķ��a�������������C���˄t��һ����ֱ��ǰ�M��������D�ň�ʹ�䲻�����D���Á팢Һ�w������Ķ��Ƅ�����ǰ�\�ӡ�
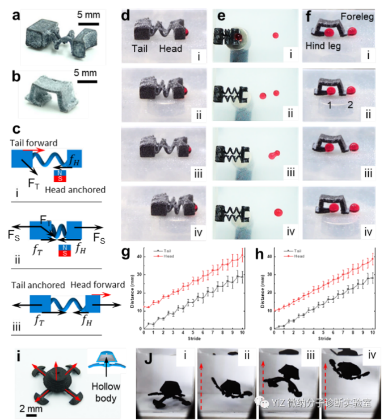
�D4����˨ϵ�����͙C���ˣ�a��ëë�x�C���� ��b��ľ�R�C���ˣ�c��ëë�x�C���˵��\��ԭ����d��ëë�x�C�����Ƅ�һ��Һ�Σ�e) ëë�x�C���ˌ�һ��Һ��������һ��Һ�Σ�ʹ֮�ںϣ�f) ľ�R�C����ͬ�r�ƄӃɂ�Һ�Σ�g)ëë�x�C���˵IJ�����h)ľ�R�C���˵IJ�����i��ˮĸ�C�����Լ����ĴŻ�����j) ˮĸ�C������ˮ�������΄ӡ�

�D5��ˮ�´����͙C���ˣ�a�������C���˵ĴŻ������Լ�����������·�����Ƅӣ�b) С�~�C���˵ĴŻ������Լ�������Z·�����Ƅӡ�
������ܛ�w�C���ˌ�Һ�ε��`����������dz��m���ڴ��Ԕ������wƽ�_�����y�Ĵ��Ԕ������wƽ�_��ه����Һ���м�������w����Һ��ֻ���ڶ��Sƽ����\�ӣ����͙C���˿����p��Һ�������S���g���\�ӣ������ڴ��M���Ԕ������wƽ�_�İlչ�������@�N�����������C�������ĵ������OӋ�������˴���ܛ�w�C�����Ԅӻ�����ƽ�_���ҳɹ����F��̼��ùϩ�������ˎ�Եęz�y���z�y�^��ȫ���Ԅӻ����o���˹����A�����̶��ϱ��C�˲����ˆT�İ�ȫ�c�p�٘�Ʒ����Ⱦ��ԓƽ�_��Ҫ��һ�������䣬һ������ˮ�����_��һ���Cе�۽M�ɣ��D6a�����������������z�y����Ҫ�Ļ������ߣ������_��Һ���M�и��N������ƽ�_���Cе�ۿ����Ԅ��x��ÿ�����E��Ҫ�Ĺ��߲��M��ԇ���ķְl����Ʒ�������Լ�Һ�ε��Ƅ��c�ںϵȹ��ܡ��Cе�����ȿ��ƙCеצ�����wҺ���������ij���̎ץȡ�����������_Һ�κ͘�Ʒ���_Һ�η����ڷ����_�ϵ�ָ��λ�ã��D6bi~iv�����҂ȵķ������_Һ�ΰ����������ϣ�һ�N̼��ùϩ�����ˎ�����ȵĄt������������ƌ��սM���Cе�۽����x���Ʒ���ӹ��ߌ����������B����������ɂ���Ʒ���_Һ���в�����������ʹ�����������Һ���У��D6bv~vi����Ȼ��Cе���x��C���˷��ù��ߌ�ëë�x�C���˷��ڷ����_��ָ��λ�ã��D6bvii~ix�����Cе���ٴ��x��C�����ӹ��߁�����ëë�x�C�����ƄӃɂ�Һ���M���ںϣ��D6bx������Һ���ں�֮�C�����ӹ���߀�����Á팢ʹ���^�ęC���ˁG����ָ��λ�ã��D6bxi~xii����ʣ�µăɂ�Һ�΄t����һ��ëë�x�C��������ͬ�IJ������ںϣ��ںϵ��^���У��Cе�ە��x���Ϲ�����Һ�����M�Д���ʹ֮����ںϣ��D6bxiii�������Cе�ی���һ���w����סҺ�Μp��Һ�ε����l��Һ�Ό���ַ���1��С�r���D6bxiv~xvi�������ԓ����������ˎ�ԣ��t����ˮ�⁆�����ϣ��������_Һ�Ώļtɫ׃���Sɫ���c֮�෴���������_Һ�α��ּtɫ�t����ԓ�����]����ˎ�ԡ�����һ���yԇ��8�N�����������Y����ӳ�䵽CIE 1931ɫ�ʿ��g���D6c�����鶨����������dz������ر����cĿǰ����ķ������@�õĽY����һ�£��D6d����

�D6�����M���w���\��Ĵ�����ܛ�w�C�����Ԅӻ�����ƽ�_��a���Ԅӻ�����ƽ�_ʾ��D��b����ƽ�_�ό�̼��ùϩ�������ˎ���M�Йz�y�IJ�������i-ii�����÷������_Һ�Σ�iii-iv�����Ø�Ʒ���_Һ�Σ�v�������B������ȡ������vi�������������Ʒ���_Һ��Һ���У�vii-ix������ëë�x�C�����ڷ���ƽ�_�ϵ��m��λ�ã�x��ëë�x�C�����ڴň��������Ƅ�Һ���M���ںϣ�xi-xii��ʹ���^��ëë�x�C���˱��G����ָ��λ�ã�xiii����Һ�Ȳ��M�Д��裬���CҺ�εij���ںϣ�xiv-xv: �w����סҺ�Σ�xvi����ַ���1С�r��c���z�y�ĽY��ӳ�䵽CIE 1931ɫ�ʿ��g������ˎ�Եļ�����+�^�]����ˎ�Եļ�����-�^��d��8�N�����ęz�y�Y���c���y�����õ��ĽY�����ȡ�
ԭ��朽ӣ�
Magnetic Soft Millirobots 3D Printed by Circulating Vat Photopolymerization to Manipulate Droplets Containing Hazardous Agents for In Vitro Diagnostics
Aiwu Zhou,Changyu Xu,Pojchanun Kanitthamniyom,Chelsea Shan Xian Ng,Gerard Joseph Lim,Wen Siang Lew,Shawn Vasoo,Xiaosheng Zhang,Guo Zhan Lum,Yi Zhang
Advanced Materials
https://onlinelibrary.wiley.com/doi/10.1002/adma.202200061
���d��Magnetic Soft Millirobots 3D Printed by Circulating Vat Photopolymerization to Manipulate Droplets Containing Hazardous Agents for In Vitro Diagnostics

