�Ї��ƴ�������ڡ��ǖ|���ڈF� Nat. Commun.�����F�w�뼤���������ڶ��ӻ�Һ�βٿv�Ĵ�푑����p�����ۼ����C����
����߶�Һ�εĶ��ӻ��ٿv���ھ������W�������t���z�y���I������Ҫ�đ���ǰ�����Č��ýǶȳ��l����Ч��Һ�βٿv���g��Ҫ��ܼ��ɼ���߶��m���ԡ���������ż���{�����h�̿ɿء����ﰲȫ�Ժá����h�����ʺͻ���늺ɲ����еȃ����ѱ��V��������Һ�βٿv�I��Ȼ��������Mһ���Uչ��푑�Һ�βٿv�Ĺ��ܣ��������ӻ���Һ�βٿv�������߶ȔUչ���{���߶��ԘO������
�b�ڴˣ��Ї��ƌW���g��W�{���̌�����������ڡ��ǖ|�����F������w�뼤���{���췽�����Ƃ���һ�N�����ڿ�߶�Һ�βٿv�Ĵ�푑��p�����ۼ��C���ˣ����F�˶��ӻ�Һ�βٿv���ܵ���Ч���ɣ�����Һ�ε����S�\ݔ���ϲ������ѡ���Һ�ηְl�c����ጷš������Լ��h�̼ӟᡣͬ�r���@�N�ٿv���Եĸ߷������x�������߶�Һ�βٿv���������Ԍ��F��~3.2 nL�� ~51.14 ��L�w�e������Һ�εĶ��ӻ��ٿv�����P�ɹ��ԡ�Magnetic Janus origami robot for cross-scale droplet omni-manipulation�����}�l����Nature Communications�ϣ�Nat. Commun. 14, 5455 (2023)����
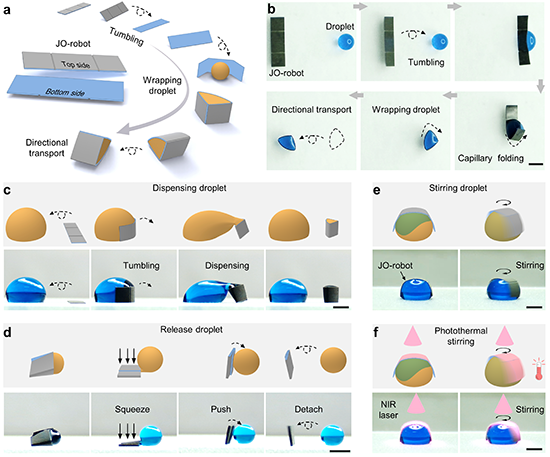
�D1. ��푑��p�����ۼ��C���˼�����Һ�βٿv���á�
��푑��p�����ۼ��C���˞���α�Ƭ��Y������ʾ��D������D��D1a��b��ʾ���C���˵����±���քe���в�ͬ�ĝ������ԣ����ϱ���鳬��ˮ��Һ��𤸽��B�����±���t����ˮ��Һ��𤸽��B��ͬ�r���C���˵��ϱ���߀�OӋ�˃ɗl�ۺۣ���ʹ�C�����cҺ������|�r��������ë�����������������ۺ��l����Һ�Ρ��C�������w݆�����ۺۺͱ����{���ܽY���ļӹ����Ծ����w�뼤�������ɡ���푑��p�����ۼ��C���˿��Ԍ��F���ӻ���Һ�βٿv���ܡ��C����ͨ�^���L���ӿ���������ˮ�Σ����Ԍ��F��ˮ�εĿɿ��\ݔ���D1b���ӈD1��������֮�⣬�C����߀����ͨ�^���L�c�ۯB�Ĵ�Һ���зְl����Һ�Σ��D1c������ͨ�^�ۯB�D���Լ��ɿط��Dጷų���Һ�Σ��D1d�����C����Ҳ�����ڴň����������D�����FҺ�w�Ŀɿػ�ϣ����Y���������Ԍ��F�h�̼ӟᣨ�D1e, f����
�ӈD1. ��푑��p�����ۼ��C���˰������\ݔҺ�Ρ�

�D2. ���ڴ�푑��p�����ۼ��C���˵�Һ�Δ��衢��ᔇ���Լ����Һ�βٿv���ɡ�
��ǰ��������푑��p�����ۼ��C���˿��Ԍ��F������̘I����������C�Ĕ��輰�ӟṦ�ܡ���D2a-c��ʾ���C���ˑҸ���Һ��픲������ڴň������¿������D�����Ԍ�Һ���M�и�Ч��ϡ��ɹ�ֲ��D����չʾ�˔����^����Һ�εĻ�ϳ̶ȣ��ӈD2�������ý��t�⼤������C����߀���Ԯa�����Ч�������F��Һ�ε��h�̼ӟᡣ�ӟ�ضȿ����_��80 �����ϡ��Y�Ϲ�����Ժʹſ����D����푑��p�����ۼ��C��������Ч���F��ճ��Һ�w�����ͣ��Ŀ��ٻ�ϣ��D2d-f����
�ӈD2. ��푑��p�����ۼ��C�������ڌ��FҺ�ο��ٻ�ϡ�
�ڌ��F���ӻ�Һ�βٿv�Ļ��A�ϣ���푑��p�����ۼ��C���˿��Ԍ���NҺ�βٿv������Ч���ɣ��Ԍ��F�B�m��Һ�βٿvĿ�ˡ���D2g��ʾ���C����ͨ�^���L�\�����ӿ����GɫҺ�β��ְl��һ���w�e����Һ�Σ��S����Һ�ζ����\ݔ���tɫҺ�θ����Ԍ��F�ɂ�Һ�εĺϲ�����Kͨ�^�������Һ�εĿ��ٻ�ϣ��ӈD3�����@�N���Һ�βٿv���ɿ��ԑ��������W�����I���FҺ�w��Ʒ�ľ��_�ɘӡ����ٷ����Լ�������ļ��r�z�y���D2h�������⣬�{�跀����Һ�w�ٿv���ܣ����ӻ�Һ�βٿv����߀�܉���Ч�Uչ���{���߶�Һ���ϣ��D2i����
�ӈD3. ���ӻ�Һ�βٿv���ܼ��ɡ�
������������C������ͨ�^����푑��p�����ۼ��C�����M�б���������Y������ӻ���Һ�βٿv���ܣ��ɹ����F�˺������ȡ�ͼ������D3����
��֮����푑��p�����ۼ��C���˿��Ԍ��F���ӻ��Ŀ�߶�Һ�βٿv���������������t���\������w���g�ȏV����Ҫ���_�@ȡ������ԇ����Һ�ΈD�����Ϳ���Һ�η������I�������Ҫ���x��

�D3. ���ڴ�푑��p�����ۼ��C���˵ĺ�����ȡ�c�������á�
���̿ƌW�WԺ�Y�B܊��ʿ��Փ�ĵ�һ���ߡ�ͨӍ���ߞ��Ї��ƌW���g��W���������ڡ��ǖ|���ں����������W���������ڡ�Փ�ĵĺ�����߀�����Ї��ƌW���g��W�Ҽ�����ڡ�����ĸ����ڡ��Ї��ƌWԺ�Ϸ����|�ƌW�о�Ժ���չ�W���ܙCе�о������`�о��T���Ї��ƌW���g��W��һ�����tԺ���������ڵȡ�ԓ��о������õ��ˇ�����Ȼ�ƌW������������ƌW�����Ї��ƌWԺ���ꄓ�´��M�����Ƽ����������c�аlӋ���Ȼ�����Ŀ��֧�֡�
ԓ�����LjF����P�ڴ�푑�Һ�βٿv���P�о��������Mչ֮һ�����������푑�Һ�βٿv���`����һֱ�Ǯ�ǰ�о������c����ˈF꠰lչ�˶�N��푑�Һ�βٿv���ԣ�Advanced Materials, 2019, 31(15): 1807507��Nano Letters, 2020, 20(10): 7519-7529��ACS Applied Materials & Interfaces, 2020, 12(37), 42264�C42273��Langmuir, 2023, 39(27), 9358-9366.���������˴�푑�Һ�βٿv���ٶȣ��Uչ�˲ٿv�Ŀ��g�S�ȣ����ɹ�����푑��ٿv���ԏĆ��ࣨҺ�ࣩ�Uչ�������ࣨҺ�ࡢ����͚��ࣩ���|�Ŀɿزٿv��Advanced Functional Materials, 2022, 32(40): 2205831����
Փ��朽ӣ�https://www.nature.com/articles/s41467-023-41092-1
