ܛ�����еĄӑB�ؓ��D�Q�����磬�ڲ�ͬ���������ް���B֮�g�ГQ��ͨ��������������W�����W���ԣ�Nature Reviews Materials 2017, 2, 17066������������Ȼ������������О���������Ҫ���á�����ʹ��׃�νY�����F�ɿ��ؓ�׃�Q���о��ˆT�_�l�˻��ڻ��W�܄����ضȡ�pH ��Ŀ��Ʋ��ԣ�Nature 2021, 592, 386-391��Nature 2019, 573, 205-213��Nature 2017 , 546, 632-636)�� Ȼ����Ŀǰ������{������������ܛ���ϵĜ��o�B�{�ƣ��_�lһ�N�߶ȿɿصĄӑB�{�ز���ʮ�־��������@һ���Կɞ��߶��ΑB�{���Ͷ�ģ�B������׃���ṩ�о��ֶΣ������ڽ�ʾ��Ȼ���Џ��s�ĄӑB׃�Q�C�ƣ����Mһ����չ��׃�νY���cܛ�����ڹ����I��đ��á�


�D 1���ŏ����w�ĄӑB�D׃ʾ��D��
3D ��׃�νY���ɓ��s�F�����w�����ЙC�菗���w�Ƴɣ���D 1 ��ʾ�����ԏ����wͨ�^���ո��N�ЙC�܄�������ױ������������������飩��ʹ�����Uɢ�������w�W�j�����Ķ����������Y������Û�����Ƃ��Ĵ��ԏ����wһ���������Hˮ�������������������ױ��r�������w�Y������Û�О����ܵ�����s����Ӱ푣��l�γɵ��S�s����ʹ��a������׃����������B����ò����ͨ�^�����w�Ď΅������܄��������ʡ��˹�ȱ�����B����͵������M���{����������׃�εĴ��ԏ����wʩ�ӏ��}�_�ň��Ż����ٽ������Ҵ����տs�֏���δ׃�Π�B������ڴŏ����w�Ќ��F�����������S�Ů��ֲ����˕r������Ӵň������������ڴŏ����w�ėl���Y���������Y�������a����߶��c��ģ�B�ĄӑB��׃��

�D 2���B����͵�Ӱ푺;���Y���Ď�׃�Q��a��ͬ߅����͌��������͵�Ӱ푡�b �Ŵ̼��²���(Wn)�������Y��������͎΅���(L/H)֮�g�Ķ����Pϵ��c �Ŵ̼���׃�νY���ķ����c߅��ǣ�����֮�g�Ķ����Pϵ��d ���ξ���Y����׃�Q��e, f ���Ǿ���ͽ��e�����׃�Q��g��h �����˹�ȱ�ݵķ��κ������ξ����׃�Q��
�@�N���������������ԵĴž��̷�ʽ�o��ģ���o���������ڿ��ٌ��F���пɾ��a���|�Ż��ֲ���ܛ�����Y�����Y�����ȡ������Լ��ݶ��ɿص�����Ӵň����܉����F�h�����o�B�{���Ķ�ģ�B�������ؓ�׃�Q�О��������U�����{���C�ƣ����߈F�߀�_�l����������Փģ���c����Ԫģ�ͣ�ϵ�y���о��˷Ǫ���ܛ���ϽY�����܄��ʹ�푑��О飬�c���Y���߶��Ǻϡ�
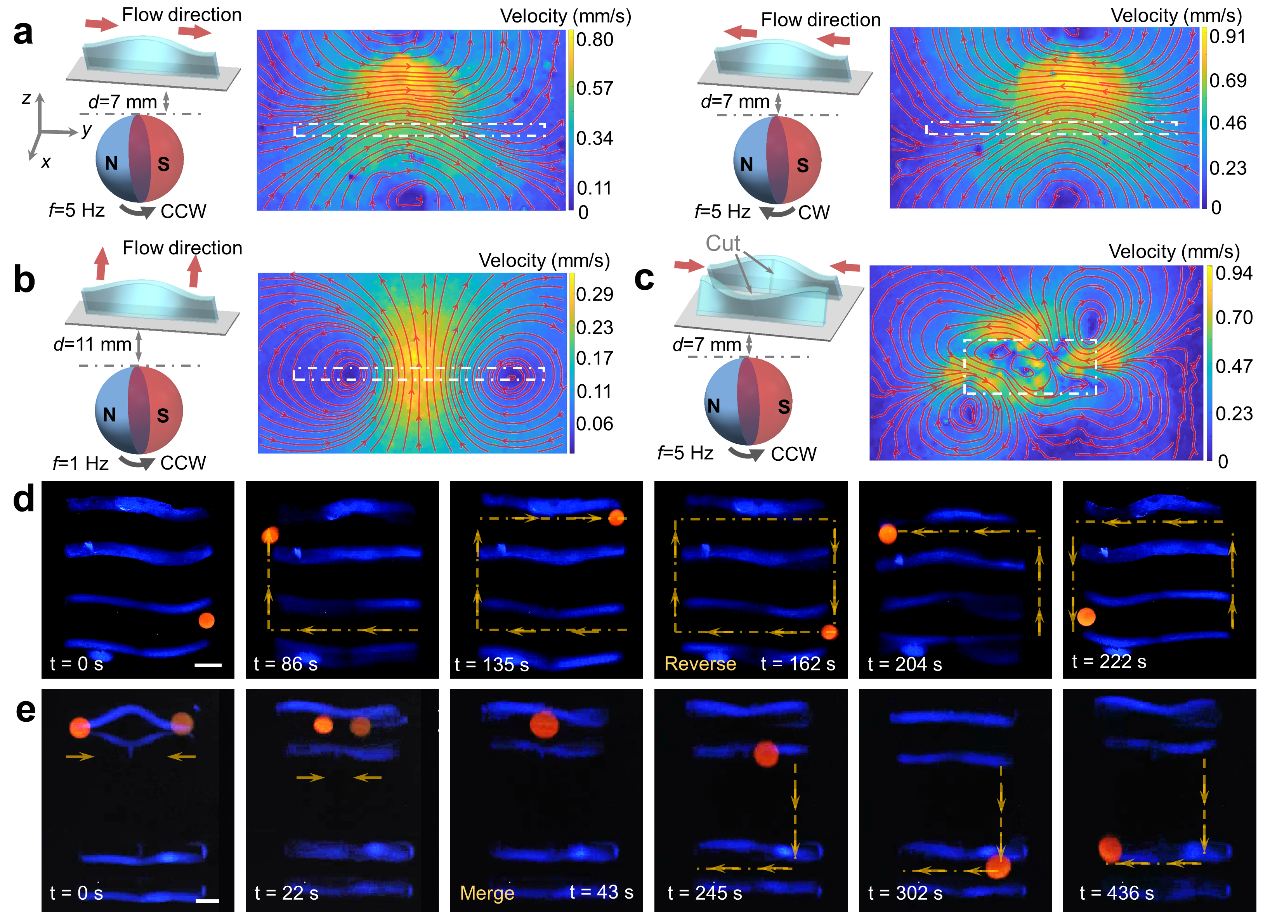
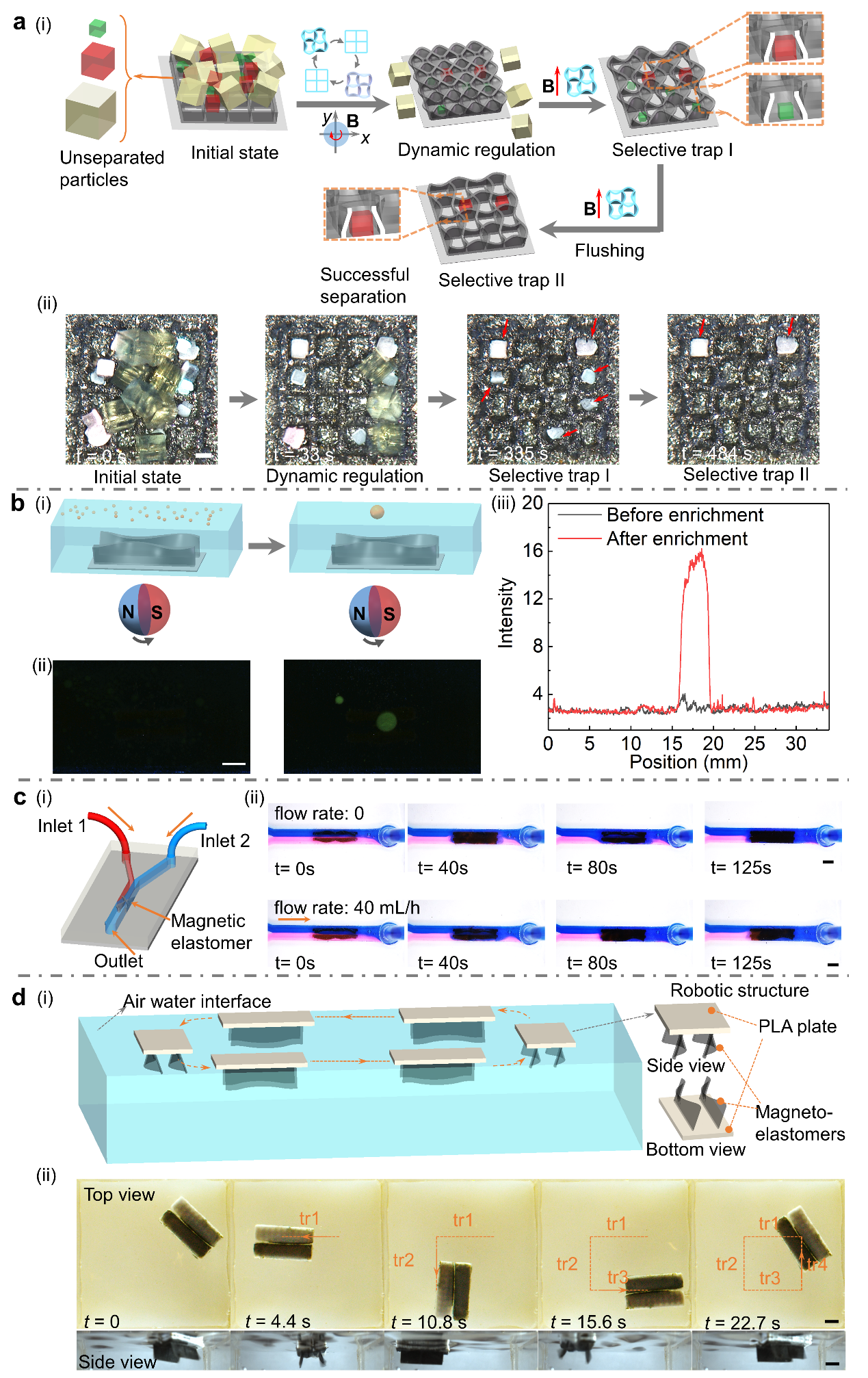
���Y���ԣ�������Ĵ�W�������ڈF��c�����I���I��W�����ڣ���|�|�����������һ�N���͵Ĵž��̲��ԣ��Ԍ��Fܛ���ϵĄӑB�ΑB׃�Q����ģʽ�������D׃�����������������F��ĴŻ�������ʽ�������lչ�ɿ����S�Ů��ֲ��Ĵ���ܛ�����ṩ��һ�N������Ч���·�����
ԭ��朽ӣ�https://www.nature.com/articles/s41467-022-35212-6
������������������n�}�M����ڴ��Ӽ�Ⱥ�C���ˡ�ܛ�w�C���˵��I���F�ˏĺ��ס����{�יC���˼��伯Ⱥ�О���о��c���ã����������ڿ��ϰl���˶�ƪ�W�gՓ�ġ������о��ɹ����£�
[1] Sci. Adv., 2022, 8(40): eabq8573�����д��_�l���ſ������C���ˡ��ί��ж������ж����ܾ�Ĥ��Ⱦ��https://www.science.org/doi/10.1126/sciadv.abq8573
[2] Sci. Adv., 2022, 8(25): eabn8932���ɾ��̵Ķ��ģ�K���ſ�ܛ�w�C���ˣ�https://www.science.org/doi/10.1126/sciadv.abn8932
[3] Nature Machine Intelligence, 2022, 4(5): 480-493����ȌW�����F�{�C���˼�Ⱥ�������h���m����Ѳ����https://www.nature.com/articles/s42256-022-00482-8
[4] Sci. Robot., 2021, 6(52): eabd2813���͙C���˺͂��y�C���˽Y�ό��F�w�ȪMСǻ���Ŀ��ٸ߾����f�ͣ�
[5] Sci. Adv., 2021, 7(9): eabe5914�������ճ�����������ѪҺ�h���еļ{���w����Ⱥ�M�Ќ��r�\�ӿ��Ƽ���λ�IJ��ԣ�
https://www.science.org/doi/10.1126/sciadv.abe5914
[6] Nat Commun 10, 5631 (2019)���������w���͙C���˼�Ⱥ���������ɺʹ��ӣ�https://www.nature.com/articles/s41467-019-13576-6
[7] Sci. Adv., 2019, 5(1): eaau9650�����ڟɹ�������ӵ��͙C�������ڙz�y�y��������أ�https://www.science.org/doi/10.1126/sciadv.aau9650
[8] Nat Commun 9, 3260 (2018)�����г��߿v�M�ȵĿ��ؘ���������͙C���˼�Ⱥ��https://www.nature.com/articles/s41467-018-05749-6
������Ĵ�W�������ڈF���퓣�http://www.cuhklizhanggroup.com/
��۳��д�W���׳����ڈF���퓣�https://biorobotics.site/
�Ї��ƌW���g��W�������ڈF���퓣�https://faculty.ustc.edu.cn/liuwang/
- ���������Ƴ��������p�Ĵŏ����w���� 2015-03-27
- �|�ϴ�W�����۽���/������ڡ�ACS AMI������׃�δ���Һ�B���ټ{��ƽ�_���ڼ�����ˎ���f�ͺʹŹ�������������ữ�� 2024-02-26
- �����������ڡ�����Ӣ�����n�}�M��Adv. Mater.����ͨ�^��������׃�ε�ܛ�|�����Ƃ�߰l����ܵĽ�늏����w 2023-05-25
- ���д�������/�w���ʽ���/ꐆ������ڡ�����˳̗��о��T��Sci. Adv.�����o�����ܵ��������֧������ʳ���S�T�o��늴̼� 2023-03-11
- ��ɽ��W�ܽ��A/�̏��Fꠡ����A��W������F� NML�C�����C���W���o��ܛ�w������ڽ����O�y 2023-03-16
- ���ƄӺ������� �Ϻ���Уһ���W�ƌ��ӑB�{�� 2013-04-01
