�������x�Ԍm����ܛ�w�C���ˁ��f��һ����Ȥ�ҷdz��������Ե��n�}���Ԍmͨ���Á������c�yԇ�C���ˌ��܇��h����̎����Ӌ���Լ���׃������һ���̶��Ϸ����˙C���˵�����ˮƽ���Ķ�����̽��δ֪�ď��s�h��������������ܛ�w�C����ͨ����Ҫ������ܛ���w�ϼ��Ʉ������������Ϳ��Ƶ�Ӳ���팍�F������X�ěQ���Լ����й��ܡ�Ŀǰܛ�w�C�������x�Ԍm������ͨ�^�ɷN;������ɣ�һ�N��ͨ�^�˞�����C�������x������ͨ�^�h�̿�����Ӵň����߹�Դ�����Ԍ��F�o����ܛ�C���ˣ����o��ܛ�C�������қQ���\��·�����Ķ�ȱ�����ܡ���һ�N�t��ͨ�^�C�d���Դ�Ϳ���������ɡ��@�N��ʽҲ�бˣ�����Y���Լ����Ə��s���o�����������s�Ԍm�ȵȡ�

�c���y�Ļ���̎����Ӌ����Ƶľ߂䡰���X���ęC������ȣ�ԓܛ�w�C���˲�����Ҫ�����X����Ҳ���Dz���Ҫ�κ�����O���Ӌ��C���ƣ��������������IJ������� - Һ�������w��һ�N��Դ���Դ푑��Ļ���ܛ���ϣ��c�Y��������Y�� - �ɶ˾���Ť�D�������Π�IJ����Q��Ť���Y�����ɭh�����܁������ӝL���c·�����ԓܛ�w�C���˿����c�܇��h���Լ��ϵK���M�н���ʽ�����c���ã��팍�F���Ҹ�֪�ϵK����ұ��ϡ��Լ�����·���x���c�Q���ȹ��ܡ�

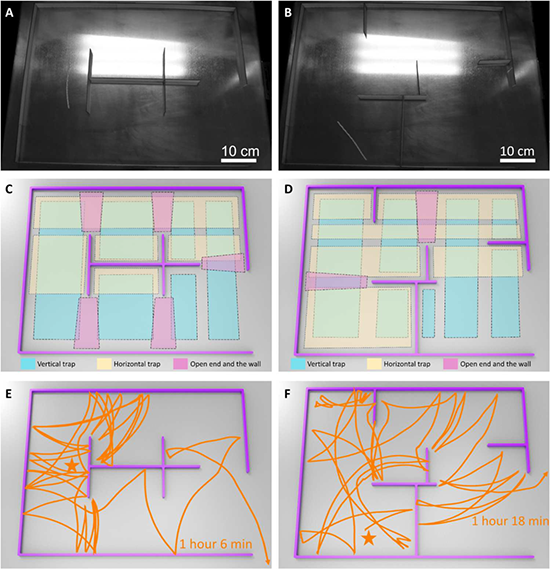
�D4��ܛ�w�C�������x�S�r�g׃�����Ԍm
ԭ��朽ӣ�https://www.science.org/doi/10.1126/sciadv.adi3254
- ���K��W���ս����n�}�M AFM�����w�w���ӳ�����Һ�������w 2025-06-24
- �eϦ���၆��W�����F� Adv. Mater.: �аl��ģʽ����׃ɫҺ�������w�� 2025-06-16
- ̹���״�W����ˬ��ʿ Adv. Mater.: �o�����l�� - �u�IҺ�������w��������������� 2025-05-31
- ���ϴ�W����/�S�M�F� AFM: �ڄӑB��ܗ�Y���{�ص��pɫ�Ҝ������ޏ͏����w���������W���ܷ��Α���ȡ�����Mչ 2025-06-25
- ���ִ�W�O������ڡ��������������ڈFꠣ����Є��o��͓p�������Ŀ�ѭ�h���ø��������w�����w�S 2025-06-21
- ���������������ڡ�˹�¸砖Ħ��WԬ�������� Nano Lett.: Mexene����ͬ�r�������x��Һ�����w�����W���ܺ�늌��� 2025-06-20
- ������Ĵ�W�T�������曲�������ں͏������� Adv. Mater. �C��������Һ���ۺ������������ܛ�w�C�����c�Ƅ��� 2024-02-22
