����������ꐝ�/Ф�i�F� Adv. Mater.���Ҹ�ʽ�p�ӽY�����F�˙C�������|�X��ʹ�X���`����֪
�������Ƥ�w������`���ȡ��Cе�m���Ժͭh�������Եȃ��ݣ��ڿɴ�����ӡ�ܛ�w�C���˺��˙C������I������Pע���������Ƥ�w����Ҫ��֧�����ڶ�N��֪�C�Ƶ������|�X�������ѱ��ɹ��_�l��ģ�����wƤ�w���|�X����/���ܡ�ʹ�X��������һ�N��Ҫ�ĸ��X�������Ԏ��������Ч���❓��Σ�U�����F���ұ��o����������о��ˆTͨ�^����ͻ�|���������羧�w�ܡ�����������Һ�B���ُͺϲ����_�l���˹�ʹ�X�����������F�o�����к���ʹ�X��֪��Ȼ�������wƤ�w�ĸ�֪ϵ�y���������چ�һ���|�X��ʹ�X��֪���෴�������F���|�X��ʹ�X��֪���ܵĸ�Ч��ϡ���ˣ����˹���֪ϵ�y�Ќ��F�|�X��ʹ�X���ɸ�֪������Խ��Խ���о��ˆT���Pע��
Ŀǰ���ЃɷN���Կ��Ԍ��F�|�X��ʹ�X���ɸ�֪�����ķ����nj�����������ͻ�|������Y�ϣ���������������ݔ�����ƾ��w�ܻ������ļ���Ķ����F�|�X��ʹ�X��B֮�g�ĄӑB�ГQ����һ�N���ɲ����ǘ������Ъ���늌W푑��О��һ�wʽ��������������ͨ�^���нM��֮�g���`���Ȳ�����`����ͻ׃���ԁ�푑��|�X��ʹ�X��Ȼ���������ɷN�������Զ�����һЩ���ޡ��Է�ɢ��ʽ�Y������������ͻ�|���������Ӽ���ϵ�y�ď��s�Ժ������y�ȡ��M��һ�wʽ���нY�����Ժ�������^�̲����F��Ч���ɣ���Ŀǰ���˹���֪ϵ�y��Ҫ�Pע�|�X��ʹ�X�ļ��ɲ��Ժ�����^�̣�����ҕ�����wƤ�w���еĸ�֪���ܺ��ܡ����D1a��ʾ�������wƤ�w��֪ϵ�y�У��Cе�ֵ�T�������w�����Ǯa���|�X��ʹ�X����Ҫԭ���⣬���wƤ�w���`���|�X��ʹ�X���ܵĸ�Ч���ɣ���ͨ�^���̖ͻ׃�О��ָʾ�ɷN���X֮�g�ĄӑB�ГQ����ˣ�ͨ�^�����IJ��ϺͽY���OӋ�����F�����`���|�X��ʹ�X��Ч��ϵ��˹����Xϵ�y������Ҫ�����x��
���ڣ��Ї��ƌWԺ�������������ܸ߷��Ӳ��ψF�ꐝ��о��T��Ф�i�о��T������̼��/�߷��ӏͺϏ��Ա�Ĥ�Ę����������Ԃ��з�����о����A���OӋ��һ�N��ʯīϩ��늱�Ĥ�M�ɵđҸ��p�ӂ��нY�������F�˙Cе�ֵ�錧���|ʹ��Ч���ɸ�֪������چ�һ�Ҹ����ͣ��p�ӽY�����ÑҸ����Ա�Ĥ�����S��׃�͙Cе���|�О�քe�|�l���ֵ���ֵ����ģʽ�������������ͻ׃ָʾ�|�X��ʹ�X���D׃���D1b�����@�N�Ҹ��p�����Ƥ�w�ɼ��ɵ��C���ֱ��沢������ȫ�Ľ������棬���F�Ѻ��˙C�����^�̣��D1c����ԓ�����������}����A Suspended, Three-dimensional Morphing Sensory System for Robots to Feel and Protect����Փ�İl����Advanced Materials�ϣ�Adv. Mater. 2024����

�D1. �����|ʹ���ɸ�֪�đҸ��p�����Ƥ�w�����Ѻ��˙C��������
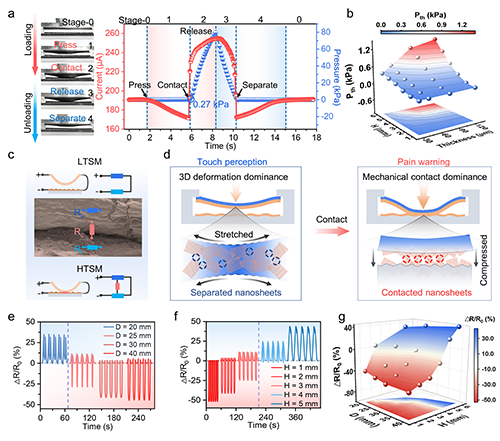
���˘����Ҹ��p�Ӹ�֪�Y������Ҫ�քe�Ƃ�Ҹ�������׃�Ӻ͙Cе���|�Б����ף��D2�������ȣ�ͨ�^ˮ/�����M�b�����Ƃ��˻������І�Ԫ - ʯīϩ��Ĥ���S��ͨ�^Ecoflex��Һԭλ�����Q���ܻ����γɾ���Ƕ��ʽ����Y���ď���ʯīϩ/Ecoflex Janus��Ĥ��GEJF���������乲��ճ�����п����Կ�ܱ������γɑҸ�������׃�ӡ�����ˮ/�����M�b�w�����Ŀ��D���ԣ�ʯīϩ��Ĥ߀��ͨ�^�����D�Ʒ�ֱ���N���������r�ױ��档��������ʯīϩƬ���������r�ױ���ĸ���������ͨ�^�Ϳ�ɰ������ֲڽY������K�γɾ����Y�������PDMS/ʯīϩ��Ĥ��mPGr���������Cе���|�Б����ס����������Ҹ�������׃�Ӻ͙Cе���|�Б������挦��ѯB��ͨ�^�����g��ӷ��x�Ķ������Ҹ��p�Ӹ�֪�������D2f�����ډ��������£��όӑҸ����Ա�Ĥ�l�����S��׃��푑����ֵ�錧���|�X�О顣�����ɌӰl���Cе���|�������˲�g���������M����ֵ�錧��ʹ�X�A�Σ��Ķ����F�|�X��ʹ�X�ļ��ɸ�֪���D2g��2h����
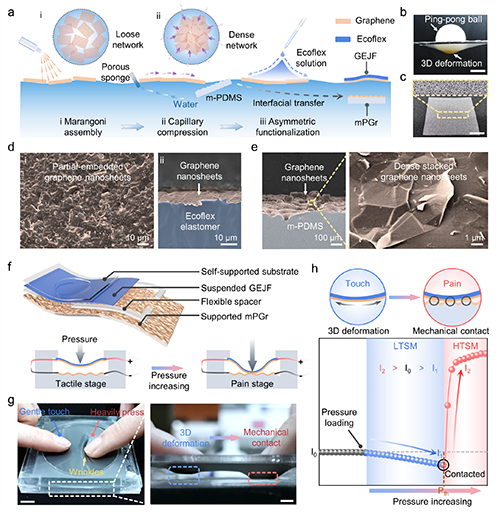
�D2. �Ҹ��p�������Ę��������|ʹ���ɸ�֪�О�
���Ȍ��Ҹ��p�Ӹ�֪�����C�푑��О��M����Ԕ���о����D3a�������p�ӽ��|ǰ��ʩ�ӵĉ������F���˷Ǿ���׃�������������أ�����ʬF�����Ȝp������ͻ׃�О飬��ָʾ�|�X��ʹ�X���D׃��ʹ�X�ֵ��Pth�����������Ɍӽ��|˲�g�ĉ���ֵ��ͨ�^��׃�Ҹ���Ĥ��Ⱥ��g���߶ȿ����M���`���{�����D3b����ֵ��ע����ǣ����|�X��ʹ�X�A�Σ��p�ӽY���Ȳ����������·���·���ГQ���D3c�������У��Ҹ���Ĥ�����S��׃�����|�X푑�����ͨ�^�M�������T��ʯīϩƬ�ӷ��x���F������͡����p�Ӱl���Cе���|������늽��|������M��ӿv�����ӣ��Ķ����F������������D3d����Ȼ�����@�N��̖ͻ׃ָʾ���|ʹ�D׃�О��ܵ��ˑҸ���Ĥֱ�����g���߶ȵ�Ӱ푡��S���Ҹ���Ĥֱ���pС���g���߶������p�ӽ��|˲�g�Ҹ����Ա�Ĥ��������^��������y������늽��|���棬��������ٷ�������ʹ�X��֪�О���u��ʧ���D3e-g������ˣ��|�X�cʹ�X�A�δ������@�ĸ����Pϵ�����БҸ�����Ĥ���S��׃��������׃�����Cе���|���ʹ�X푑��О����@��Ӱ푡�
�D3. �Ǿ��ԙCе�̼��T�����|ʹ�pģ��֪������푑��О�
���������Ҹ��p���������|�X��ʹ�X푑������M����Ԕ���о������|�X�A�Σ���ه�ڑҸ���Ĥ�����S��׃�О飬ͨ�^����ʯīϩ��Ⱥ͏��Ա�Ĥ��ȿ������@����|�X��֪���ܣ��D4a��4b�����S���������ӣ��Ҹ���Ĥ�������u�������F�������ҿ��؏͵�푑��������D4c���������ڑҸ��Y������׃���������Ҹ��p���������|�X�A�ξ���0.12 s�Ŀ���푑����ܣ��D4d����ͬ�r��߀�ܾ���ۙ���L��20 ��m�ĄӑB���d�^�̣��D4e���������z�y���p���ӣ�0.02 Pa�������o�B�̼����D4f�����M��ʹ�X�A�κ��S�����|��������GEJF��mPGr֮�g��늽��|λ�c�������Ӳ���uͣ���˿�����ڽ��|˲�g��������֮��ƽ��׃�����D4g��4h��������GEJF���γɵİ�Ƕ��Y����mPGr���Y���Ĵ��ڣ����C��ʯīϩ�{��Ƭ���ڽ�����|�r�ķ����ԣ��Ҹ��p����������ʹ푑������S���|�������ӱ��F�������õ�ѭ�h���ܣ��D4i��������5200���B�m�Ľ��|-���x�^����չʾ�������ɿ���푑����ܣ��D4j�������H��ˣ��Ҹ��p������߀��ͨ�^������A��׃����푑��༉�Ӊ��^�̣����F�������|�X��ʹ�X������֪�О飨�D4k����
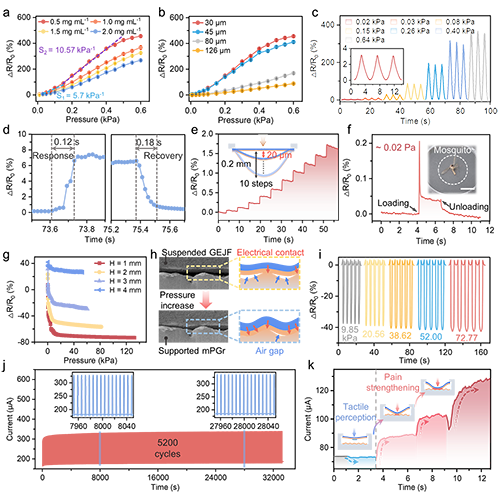
�D4. �Ҹ��p���������|�X��ʹ�X����
�Mһ����ͨ�^�Y�Ϲ�W����ģ�K���Ҹ��p������߀�ܼ��ɵ����ֱ��棬ȥģ�����wƤ�w�ڽ��|���J��ƽ������r���|ʹ�����������F��ҕ����֪���D5a��5b�������w���f�������|���J���w����r���Ҹ����Ա�Ĥ����׃�̶ȸ�����˸����װl���Cе���|���a����̖ͻ׃���Ķ��M��ʹ�X�A�Σ����c���tɫLED���l����ʹ�A�����D5c-e�������H��ˣ�ͨ�^���g���߶Ƚ�����200 ��m��߀�ܘ����ߴ��1×1 cm2��С�ͻ���������������ճ����������ָ���棬�Ԍ��F�������|�X�ͼ�̵�ʹ�X�z�y���D5f�������ü����|����ɏ������r��ͨ�^���׃����ӳ��D�V���Է�ӳ��ͬ��ָ���|ʹ�ֲ����D5g�������⣬��С�͂���������������W푑�ϵ�y��߀��ͨ�^�tɫLED���c����ʾ��̮a������ʹ�����⌦���Ԃ��в��ϵij��m�p�����D5h����

�D5. �Ҹ��p�������������w������J�ȵĿ�ҕ���|�X��֪��ʹ�X�A��
����Ҹ��p�ӂ��������͙C�����M�м��ɣ�̽�������Ѻ��˙C�����еđ��ã��D6a��5b�������ȣ��Ҹ��p�������x��C�������ӵ��|ʹ��֪���ܣ�ʹ���܉�ͨ�^��̖��׃����ֱ��p���|�����������Ó�����Ҏ��Σ�U�������D6c-e�������⣬���ɑҸ��p�����Ƥ�w�ęC����߀�������Ӻͱ��ӵķ�ʽ��֪���ֽ����^�����^��������ɵ���ʹ�У���ͨ�^���������@һ�������r���o������������������F�Ѻ��Ұ�ȫ���˙C�����^�̣��D6f-i����
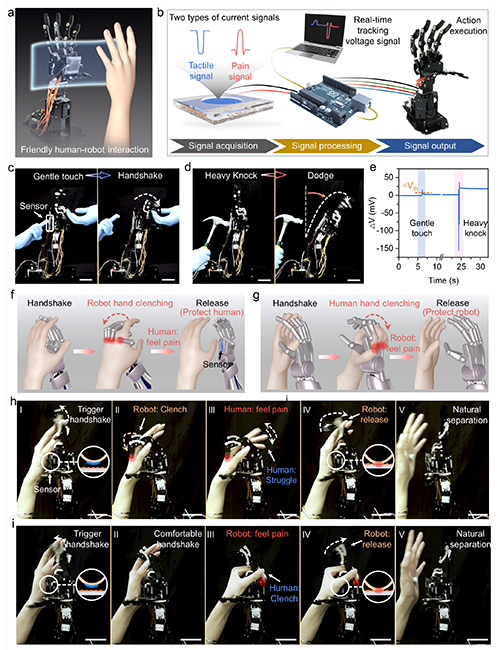
�D6. �Ҹ��p�����������Ѻ��˙C����
���ā��f���@헹���ͨ�^�����Ҹ��p�Ӹ�֪�Y�������ÑҸ����Ա�Ĥ�����S��׃�͙Cе���|�C�ƣ���Ч��ģ��������Ƥ�w�|ʹ��֪�О飬�阋�������`���|�X��ʹ�X������ϵ��˹���֪ϵ�y�ṩ���µ�˼·���ڷ�����Ӻ������˙C�������I����F����đ��Ý�����
���о��õ��ˇ������c�аlӋ����2022YFC2805200����������Ȼ�ƌW������52373094, 52073295�����㽭������_���о��Ŀ��No.2022MG0AB01�����еº������H�����Ŀ��M-0424�����������H�����Ŀ��2023H019�����Ŀ���Y����
ԭ��朽ӣ�https://doi.org/10.1002/adma.202403447
