��ģ�B�|�X��֪ͨ�^ģ�M���Ƥ�w�Ķ�Ԫ��֪���ܣ�ʹ����ϵ�y�܉�ʴ_�������s�h����Ϣ���ڷ�����֫���ɴ��������O�y���˙C�������I��l�]���P�I���á��mȻ��ǰ��ģ�B�|�Xϵ�y�ڙz�yģ�B���ӻ����ضȡ���׃���������ӽ��ȵȣ������������������ޏ͡��Թ��ܵȣ��ȷ���ȡ����Ҫ�Mչ�����F��ϵ�y�����R���������Ć��}���@��Ҫ�����ڃɴ��P�I���أ�1�����������ĸ�֪���ܲ��㣻2�����������Ľ�����Ծ��ޡ�
ᘌ��������}���㽭��W�Cе���̌WԺ���s�n�}�M�����һ�N�C���W��������ģ�K���x��Ƥ�w��ͨ�^���в��Ϻͽ�����Եąfͬ�������F�����V��ģ�B������H֪���W�g�ڿ���Advanced Materials������Machine Learning-Enhanced Modular Ionic Skin for Broad-Spectrum Multimodal Discriminability in Bidirectional Human�CRobot Interaction�����}�����ԓ헳ɹ�����ٻٻ��ʿ��Փ�ĵ�һ���ߣ����s�о��T����P���о��T��Փ��ͨӍ���ߣ������ԗ��A��Ժʿ�Fꠡ����о������õ��Ї���ӌW��-�vӍRoboticsXϬţ�B����о�Ӌ�����|��늚⼯�F-�㽭��W�τ����о�Ժ���Y����������Ȼ�ƌW����(No. 52375031, 52475610)���㽭ʡ��Ȼ�ƌW����(LDQ24E050001)���㽭ʡ�Ƽ��d����������I�㡱�аl���PӋ����No. 2023C01045, 2023C03007�����㽭ʡ�Ƽ��d������I��+X���аl���PӋ����No. 2024C04057(CSJ)����֧�֡�
1.�������������x
��ģ�B�|�X��֪ͨ�^ģ�M���Ƥ�w�Ķ�Ԫ��֪���ܣ�������ϵ�y�������s�h����̖�ṩ���P�I���g֧�֡��mȻ��ǰ��ģ�B�|�Xϵ�y��ģ�B�����c���ܼ��ɷ���ȡ���@���Mչ����������֪������������ؽ��ͻ�Ƶ�ƿ�i���}���F���،���������о���Ҫ�ɂ���������չ�_����֪���������c��������_�l���ڸ�֪�����������棬����������������1�������ܲ����_�l����2�������Y�����̡��M���@Щ�������@�������������ܣ������s���Ƃ乤ˇ���^��ęCе/���淀�����Ƽs���䌍�H���á����֮�£�ͨ�^���ϽM���{�،��F��ģ�B���܃����IJ����m���й�ˇ���㡢�������{�ȃ��ݣ��s�rҊϵ�y�о�����������о���Ҫ�۽����������1���x���Ԃ��в����OӋ����2�����ɔ_�����ܘ�����3�����W��ģ���Ȼ�����@Щ����ͨ���H�m�����ض���̖�Pϵ�����ނ��з������y�Ԍ��F�V�V����c�������l���Ă��y�������ȣ������Ӳ��Ը����m��ģ�B�g�ď��s�Ǿ�����ϣ�չ�F���@�����ݡ�ֵ��ע����ǣ��،���������|����Ҫ��֪�����c������Ե�ϵ�y���fͬ���������F���о���δ������Ч�ąfͬ�����C�ơ�
ᘌ��@һ�о��հף����о��_�l�����ڙC���W�������Ķ�ģ�Bģ�K���x��Ƥ�wϵ�y��ͨ�^���в����c�����㷨�ąfͬ������ϵ�y���F�����V��ģ�B��̖�ĸ�Ч��������D1a��ʾ��ԓϵ�y���Ѓ����Ŀ������ԣ���ģ�K���������ք��R�e�ɴ����ֲ����͙C�����|�X��֪�Aצ����ϵ�y�ܘ����D1b������������OӋ���x�ӌ��wģ�K���ضȸ�֪ģ�K��TSC������׃��֪ģ�K��SSC���͉�����֪ģ�K��PSC����չ�F��Խ����ģ�B��֪���ܡ����Q���y�x��Ƥ�w�ğ�����y�}�����������L����ӛ����LSTM���W�j�㷨��ͨ�^���ƻ���ģ�B��ϔ�����Ӗ���������Եؘ����˸�Ч�Ĕ����ӽ���ģ�ͣ��D1c�����@�Nģ�K���x��Ƥ�w�c�����ӽ���ģ�͵��ЙC�Y�ϣ��γ���һ������������-�㷨�fͬ�����������D1d�����������u��ϵ�y���ܣ����о��״����"�����֪�L��"�u�rָ�����D1e�������Y��������ԓָ���^15�N�F�ж�ģ�Bϵ�y�����@���������C�˅fͬ������������չ��ģ�B���������Ī����ݡ�
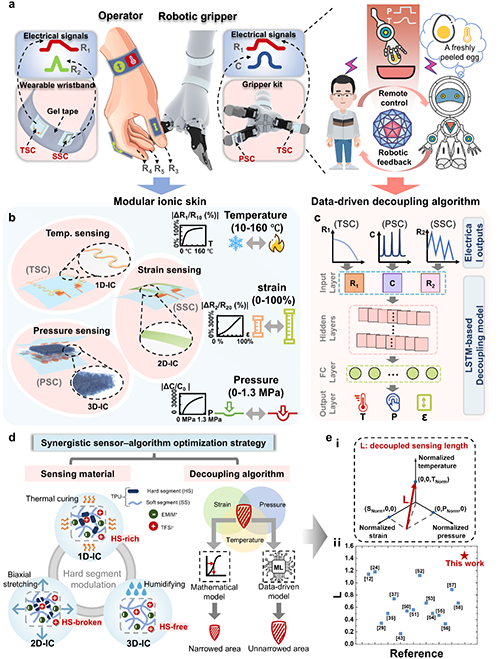
�D1. �C���W��������ģ�K���x��Ƥ�w���F�˙C�����Č��V��ģ�B����
2. ӑՓ
2.1. һ�S�����S�����S�x�ӌ��w���Ƃ��c����
�D2չʾ��һ�S�x�ӌ��w��1D-IC�������S�x�ӌ��w��2D-IC�������S�x�ӌ��w��3D-IC�����Ƃ��c�����Y�����D2aչʾ��ͨ�^���������Ƃ���|�x�����z��Һ�����������N��ͬ��ˇ�@���������w����̻��Ƃ��1D-IC�ʬFӲ�ξۼ���Y������̻��Y���p�������Ƃ��2D-IC�@ʾӲ�Δ�����������ˇ�Ƃ��3D-IC�t���FӲ�������Y�����D2bչʾ������w�Č�����ò���ȡ��^�Y�������@ʾ��3D-IC��SEM�D�D2c���C���܄�����������ò���{�����á����W���ܜyԇ������2D-ICչ�F���������������ܣ��D2d������3D-IC�t���F�����õĉ��s���ԣ��D2e�����������V�������D2f����2800-3800 cm?1�������^�쵽C-H��N-H��s��ӷ及�ȏ�һ�S�x�ӌ��w�����S�x�ӌ��w��u���͡����ܜyԇ�Y���@ʾ����ͬԭ����ȵ�1D-IC��10-160�淶���ȱ��F���ض�푑����ԣ��D2g������ֶξ��Ԝض�ϵ����10-20�淶���ʬF���ֵ���D2h����2D-ICͨ�^�p������̎�������ˑ�׃ϵ�����D2i�����ґ�׃��֪���ܿ�ͨ�^��ȃ������D2j����3D-IC�ĉ���푑������c�܄������������P���D2k����ͬ�rչ�F�����õęCе�;��ԣ��D2l����
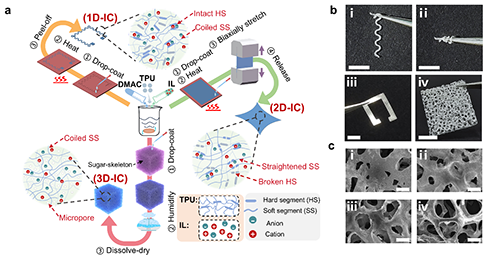

�D2. һ�S�����S�����S�x�ӌ��w���Ƃ��c����
2.2. ��ģ�B��֪ģ�K���OӋ�c����
TSC��SSC��PSC�քe����1D-IC��2D-IC��3D-IC���Ϙ�������TPU:IL:DMAC��ȷքe��1:3:4��1:1:4��1:1:7���D3aչʾ����ģ�B��֪ģ�K�ĽY���OӋ���D3bԔ���U����TSC��SSC��PSC���Nģ�K�Ĺ���ԭ����ᘌ�PSCģ�K���D3cͨ�^���W������C�����ξW�j늘O�Y���ă��ݡ����ܜyԇ�Y���@ʾ��TSCģ�K��10-160��C�����ȱ��F�����������푑����D3d��������14-116��C�ض�ѭ�h17С�r���Ա��������������D3e����SSCģ�K���傀��Ʒ��0-50%��׃�����ȳʬF�߶�һ�µ����푑����D3f����PSCģ�K��0-1300kPa������չ�F�����õ����׃�����ԣ��D3g�������ڄӑBѭ�h���d�±��ַ���푑����D3h�������⣬�D3i�C��PSCģ�K�����ξW�j늘O�OӋ���H�����˙Cе�;��ԣ�߀�߂䃞���ēp�����e������

�D3. ��ģ�B��֪ģ�K���OӋ�c����
2.3. ģ�K���x��Ƥ�w�Ĕ����ӽ������
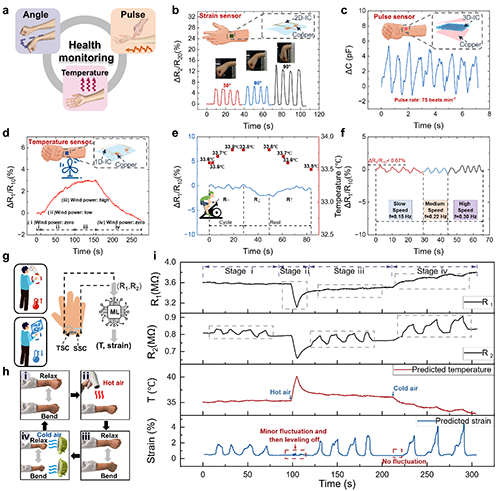
�D4չʾ�˶�ģ�B��֪�еğ���ϬF�����������D4a��ʾ��SSC��PSCģ�K���ڵğ����Ч����SSCģ�K����S�ض����߶����ͣ���PSCģ�K��݄t�S֮���������ضȸɔ_�����о��OӋ�ˌ��ý���ģ�Ͳ������˶�ģ�BӖ�����������D4b-4d��������Ĕ����ӽ���ģ�ͣ��D4e����������������ģ�ͣ��քeᘌ�TSC��SSC��PSCģ�K�������u���@ʾ��1����������棬���15헬F���о������������F�˸����ĜضȽ��������T=100��C���͉������������P=400kPa�����Լ��еȵđ�׃�����������=30%�����D4f����2���A�y���ȷ��棬ģ�͌��ضȡ���׃�͉����������A�y�`��քeС��5.8%��15.0%��7.0%���D4g����3�����r���ܷ��棬325���B�m�yԇ�Мض��A�y�`��<1��C����׃�͉����A�yֵ�c���yֵ�߶��Ǻϣ��D4h-4j�������⣬�D4k-4mչʾ��������ģ�͵��㷨���x�^�̡�

�D4. ���ڶ�̼���������LSTM�㷨�Ĕ����ӽ������
2.4. ģ�K���x��Ƥ�w�����ڽ����O�y
�D5չʾ�˻����x�ӌ��w�Ķ�ģ�B������̖�O�yϵ�y��1D-IC��2D-IC��3D-IC�քe���F�ˌ��ضȡ���׃�͉������`��푑����D5a�����ɹ������ڱ�Ƥ�ضȡ��ǶȺ��}�����ʱO�y�����w���ԣ�2D-IC��׃�������ɜʴ_�R�e��ͬ�����Ƕȣ��D5b����3D-IC�����������ܿɿ��z�y�}����̖��Ӌ���}���l�ʣ��D5c����1D-IC�ضȂ��������H�ܱO�y�h�����������Ƥ�w�ض�׃�����D5d����߀��ۙ��ԇ���\�Ӡ�B���T��/�oϢ���µ��w�ز��ӣ��D5e����ͬ�rչ�F�������Ŀ������ɔ_�������D5f�������⣬�_�l�ļ��ɻ��pģ�B���D5g-5i���Y��TSC��SSCģ�K���ڽ���ģ���o�����F������ضȺͽǶȵČ��rͬ���O�y��
�D5. һ�S���S/���S�x�ӌ��w���������w�����O�y
2.5. ģ�K���x��Ƥ�w�����ڙC���˿���
�D6չʾ��ģ�K���x��Ƥ�w�ڙC���˿����еđ��á����ڿɴ����ֲ�����ϵ�y���D6a���ɹ����F��׃�حh���µęC�����u��ץȡ�΄գ��D6bԔ��չʾ�˲����^���е��P�I���E�Լ��傀�P�I�z�y���Č��rݔ������������ģ��Ч����C���������ڟo����ģ�͗l���£��D6c�����������A�yֵ�ܜضȽ��ɔ_�����C���˳��Fץȡ���^���ጷ��_�϶Ȳ���Ć��}�������Ô����ӽ���ģ�ͺD6d����ϵ�y����Ч���Ɯضȸɔ_�����F���_��ץȡ�����ơ����Ȍ���C���˽���ģ���ڏ��s�h���еķ����ԃ��ݡ�
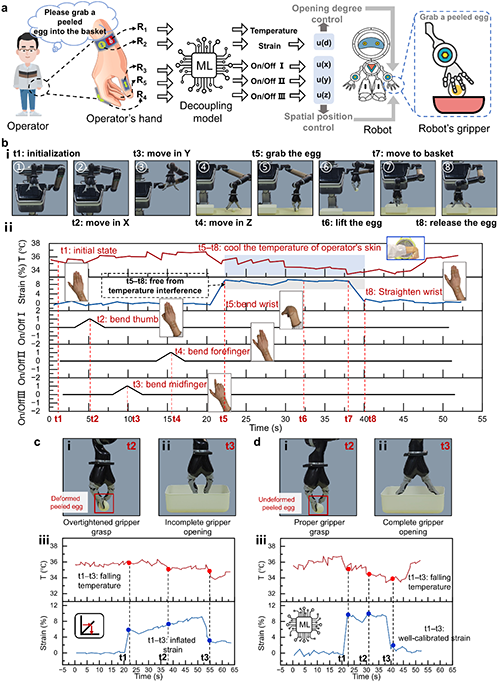
�D6. �C���W���o���Ŀɴ����ֲ��������ڙC���˿���
2.6. ģ�K���x��Ƥ�w�����ڙC���˸�֪����
�D7չʾ�˻���ģ�K���x��Ƥ�w�ęC���ˊAצ��֪ϵ�y�����u��ϵ�y���ȣ���ģ���A�yֵ�c���Â������M�Ќ��ȣ��D7a�������r�O�y�����@ʾ���D7b�����ض��A�y��ֵ23.6�棨���y22.2�棩�������A�y��ֵ�քe��10.2kPa��20.3kPa��44.7kPa��82.6kPa���������yֵ7.6kPa��23.1kPa��46.9kPa��77.7kPa��������ϵ�y���пɿ����pģ�B�A�y������������ʾ�У��D7c�������ض�/������֪ģ�K�ęCе�Aצ�ɹ���ɵ�ˮ�΄գ��D7d���������^���и����Ѕ���׃���������D7e���ʴ_��ӳ�˙C�����c�h���Ľ�����B����C��ԓ��֪ϵ�y�Č��Ãrֵ��
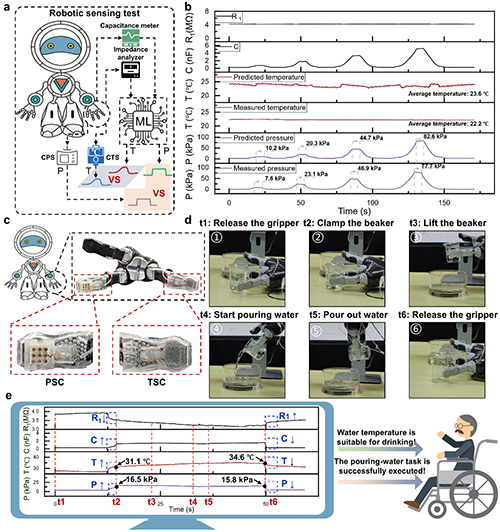
�D7. �C���W�������ęC���ˊAצ�������ڙC���˸�֪
3. ���Y
���о������һ�N���ڙC���W��������ģ�K���x��Ƥ�wϵ�y��ͨ�^�����c�㷨�ąfͬ�������F�ˌ��V��ģ�B��̖����ڲ����OӋ���棬ͨ�^�����{�ؾۺ���Ӳ�νY�����ɹ��_�l�����N���ܻ��x�ӌ��w��1D-IC����-4.00%·��?1��10-160�棩�ij��͜ض�ϵ����2D-ICչ�F2.95��0-100%���ľ��ԑ�׃푑���3D-IC�t���F80.5 kPa?1��0-1.3 MPa���ĸ߉����`�����������@���N�x�ӌ��w�����Ķ�ģ�B��֪ģ�Kչ�F��Խ�Ă������ܡ����㷨���棬���µĔ����ӽ���ģ����Ч�����˶�ģ�B�̼��c푑��g�ķǾ���ӳ�䣬���F�˜ض��c������̖������������A�y�`����7.0%����ͬ�r���֑�׃�z�y�Ŀ��ضȸɔ_������ϵ�y�����u�r��������"�����֪�L��"��ָ�ˣ��������^�F��15�Nϵ�y�����@�������H������C������1�������O�y����Ƥ�ضȡ��ǶȺ��}����̖�z�y����2���˙C�������ɴ����ֲ��������͙C���ˊAצϵ�y�����@Щ�ɹ����չʾ��ԓϵ�y�����ܸ�֪�I��đ��Ý�����
ԭ��朽ӣ������M���d����https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202508795
- ���|��W������ Small���C���W���o���ı�����Ԅ������Ϳ���Ûˮ���z���Ԃ���������ˮ���ք��R�e 2025-05-26
- ���₥���ڈF� Adv. Mater.���������OӋ��Ҋ�C���W�� - δ�����ܟ�������� 2025-05-17
- �п�Ժ�L�������� AM: �l�����C���W������ԇ�e���� - ���F���z�䷽��Ч���O�ރ������ё����ڸ��g�b������ 2025-03-14
- ����ꡢ����������ꐝ�/κ���ܡ�Adv. Mater.���������`���Թ���x��Ƥ�w��늈��T���p�ݶ�ˮ���z�x�Ӷ��O�� 2025-04-03
- ���ڼ��g��Wʷ���|�� Nano Lett.��һ�N����ԭλ�����ػ������@ʾ�Ŀ�׃ɫ�x��Ƥ�w 2024-04-18
- �|�A��W������/�O��ͯ�Fꠡ�Nat. Commun.������혷��x��Ƥ�w 2024-01-31
- ���T��W�O���LjF� AFM������ȡ�������p�W�j�o�܄�������z���������˙C�������� 2025-05-29
