��Ȼ���е��S�����ﶼ�����m��(y��ng)�h(hu��n)�����������܉����ض����ⲿ�h(hu��n)���Юa(ch��n)�������ġ��B�m(x��)�ĺ���Ҏ(gu��)�ɵ�푑�(y��ng)���@�N����������������Ԇ��l(f��)���о���ȥ�аl(f��)�܉��m��(y��ng)�ⲿ�h(hu��n)���̼����a(ch��n)������׃���\(y��n)�ӵ����������(q��)�����Լ�ܛ�w�C(j��)���ˡ�Ȼ���������(sh��)���������(q��)�����ں㶨��׃���ⲿ�h(hu��n)���̼��H�a(ch��n)�����ɾS�ֵġ��o�����ԵĆδ��\(y��n)�ӡ�ģ�M�����w�������\(y��n)�����ԣ��O(sh��)Ӌ���ں㶨���ⲿ�h(hu��n)���̼��®a(ch��n)�������\(y��n)�ӵ����������(q��)����Ŀǰ��Ȼ��һ���������(zh��n)��
ᘌ��@һ����(zh��n)���Ϸʹ��I(y��)��W(xu��)���I(y��)�c�b�似�g(sh��)�о�Ժ���f�о��T�څ���̽��ڵ��I(l��ng)��(d��o)�£��O(sh��)Ӌ��һ�N���ں㶨�����®a(ch��n)���B�m(x��)����ʎ�����\(y��n)�ӵ�����̼�{��/�ۺ����(f��)���(q��)����������(sh��)�F(xi��n)�����ڹ����µ�����څ�������\(y��n)�ӡ�ԓ�(q��)�����ɾ��о����Y(ji��)��(g��u)��ˮ���Π�̼�{���p�ӱ�Ĥ�M�ɣ����Ա���ͨ�İ��Դ���(q��)�ӣ��a(ch��n)�����m(x��)�ľ��в�����ʽ������ʎ׃���\(y��n)�ӣ����\(y��n)����ʽ��������w���P�������D1�����@�N���Ͳ�����ʎ�\(y��n)�ӵĮa(ch��n)���C(j��)����Ҫ��Դ�ڹ���(q��)�ӽY(ji��)���ӰЧ��(y��ng)���a(ch��n)���Ĺ�-�C(j��)еؓ(f��)���������푑�(y��ng)�����(q��)�����L�ȷ���ĕr�g���t����(d��o)���(q��)�������ҵ����׃�Μ����Լ��(q��)���������Y(ji��)��(g��u)�����ÙC(j��)е���ԡ�
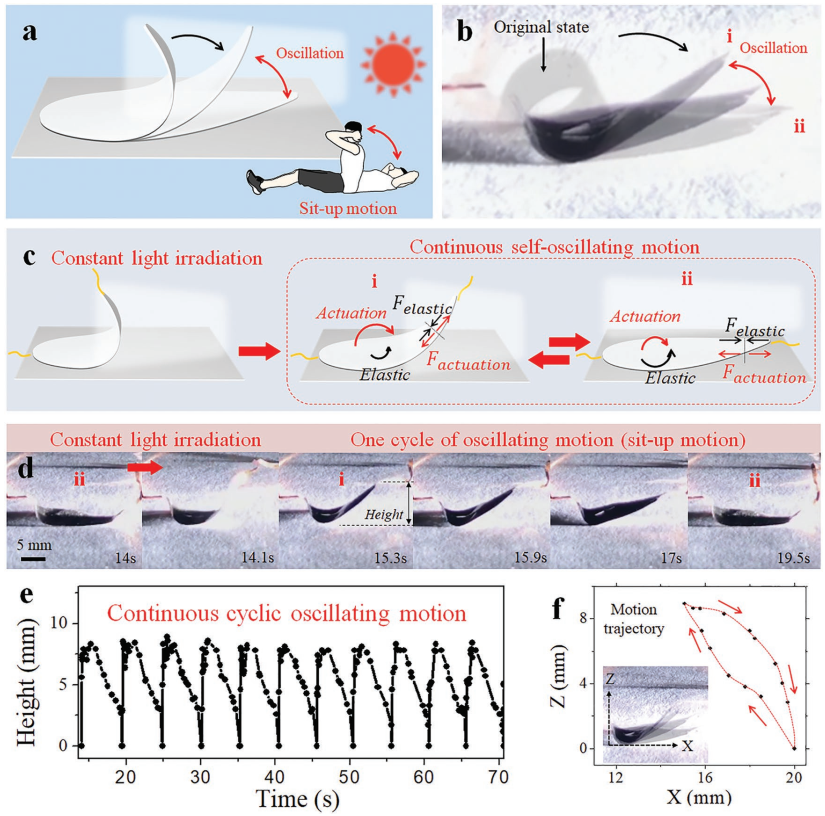
�D1. a��ˮ�Π������(q��)�����ں㶨�����®a(ch��n)����������w���P�����\(y��n)�ӵ������B�m(x��)׃�ε�ʾ��D��b���㶨�����������B�m(x��)׃�εĈDƬ��c���(q��)�����ں㶨�����®a(ch��n)�������B�m(x��)����\(y��n)�ӵęC(j��)��ʾ��D��d�������(q��)�����ڹ����®a(ch��n)����ƽ�ɣ�ii����������i��Ȼ���ٷ���ƽ�ɣ�ii���Č�(sh��)�r׃�ΈDƬ�� e���(q��)�����ں㶨�����µČ�(sh��)�r�߶�׃�������� f���(q��)����ĩ���ں㶨����������׃�ε��\(y��n)��܉�E�D���������\(y��n)�Ӟ鲨���\(y��n)�ӡ�
�M(j��n)һ���о��l(f��)�F(xi��n)��ԓ�����(q��)�����������մ̼��������m��(y��ng)�ԡ���(d��ng)��׃���շ���͏�(qi��ng)�ȕr����a(ch��n)��������׃��Ҳ����(y��ng)�İl(f��)���˸�׃����(d��ng)���Տ��(q��)�����Ă�(c��)������r���(q��)�����a(ch��n)������������P�����cŤ�D(zhu��n)�\(y��n)����Y(ji��)�ϵľ�������ģʽ������׃���\(y��n)�ӣ��D2����

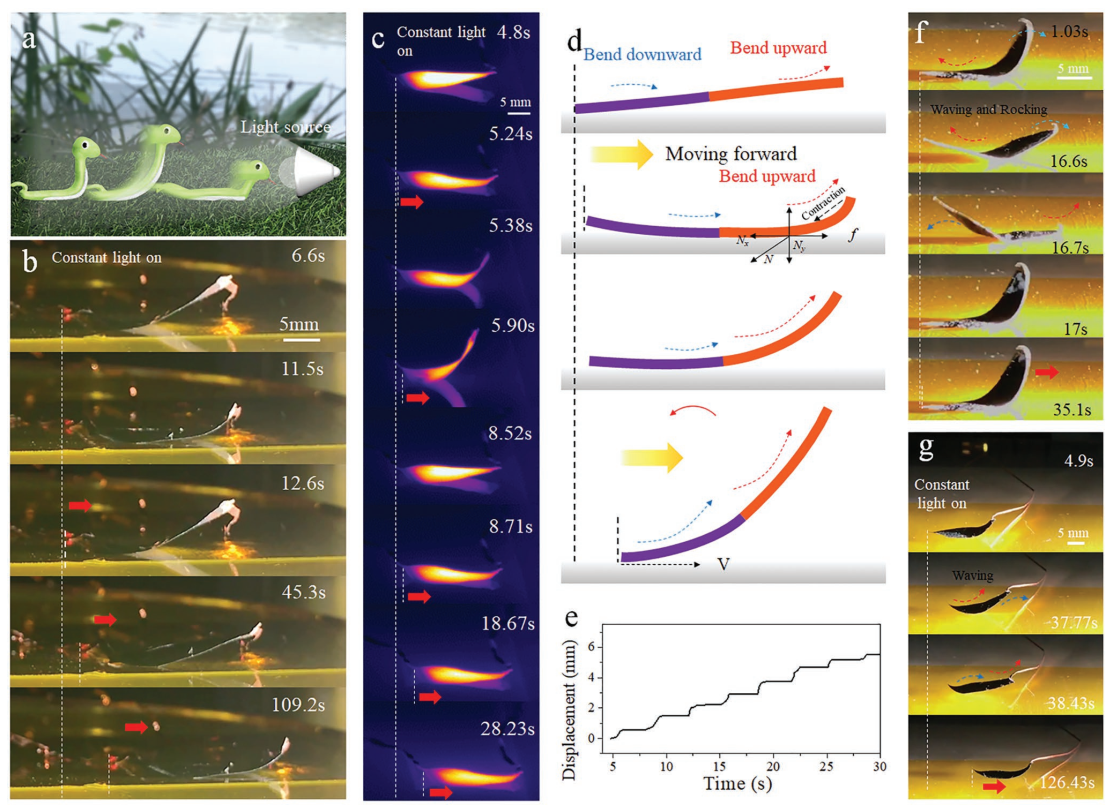
�D2 d�Cf����(d��ng)���ՏĂ�(c��)������r���(q��)�����a(ch��n)���B�m(x��)�����P�����\(y��n)�Ӻ�Ť�D(zhu��n)�\(y��n)�ӵ�ʾ��D���C(j��)��D����W(xu��)�D�� g���(q��)�����ڳ��m(x��)��(c��)������µ�����׃�εĸ߶�׃����
�����ں㶨�������³ʬF(xi��n)���Ī�(d��)�ص����������\(y��n)�ӣ�ԓ�����(q��)������ܛ�w�C(j��)���˺������ռ��I(l��ng)������^��ĝ��������磬�O(sh��)Ӌ�Ƃ��˻���ԓ�(q��)�����ġ��C(j��)���ߡ����ڹ����£����C(j��)���ߡ����Բ��ӂ����ķ�ʽ�����ء��B�m(x��)�����Դ���У����F(xi��n)�����w�����څ���\(y��n)���������ԡ��@�N���m(x��)��څ�������\(y��n)����Ҫ�������ڲ����\(y��n)���c��������������ġ����D3�������⣬ԓ���C(j��)���ߡ�߀���Է�������Ħ��늲��ϽM�ɵĻ����ϣ��Ķ���(g��u)����һ�N���͵Ĺ��(q��)�����l(f��)늙C(j��)��ͨ�^�����µ��B�m(x��)����ʎ�\(y��n)�ӌ�(d��o)�µ������Խ��|���x�cĦ���Ч��(y��ng)�ĽY(ji��)�ϣ���(sh��)�F(xi��n)���ڳ��m(x��)�����µ��B�m(x��)���̖ݔ�����D4����
�D3. �㶨�����µ�������������\(y��n)�ӡ� a�����C(j��)���ߡ��������ʾ��D�� b-c���ں㶨�������(q��)����������������\(y��n)�ӵĹ�W(xu��)�D���c�t�����D��d������������еęC(j��)��ʾ��D�� e���(q��)�����S�r�g׃��������λ��׃���� f���o��(d��o)���B�ӵ��(q��)��������������\(y��n)�ӡ�g��һ���B���Ќ�(d��o)�����(q��)��������������\(y��n)�ӡ�
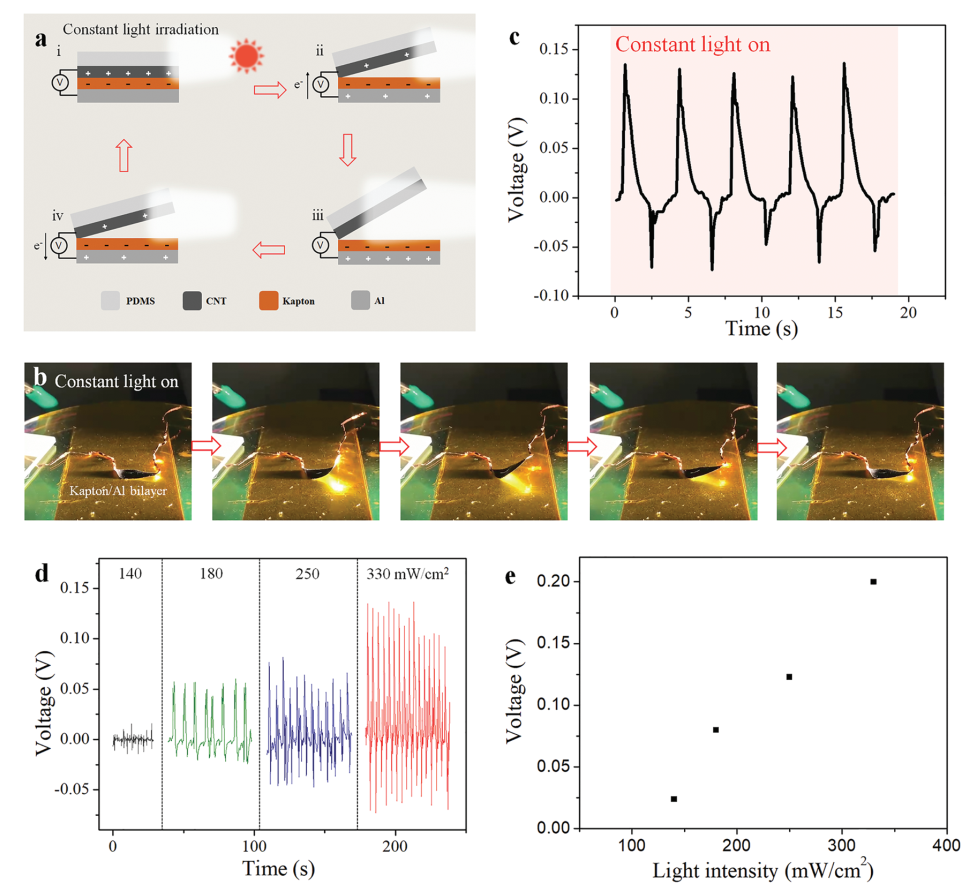
�D4. ���(q��)�Ӱl(f��)늙C(j��)���O(sh��)Ӌ�����ܱ��F(xi��n)�� a�����(q��)��Ħ���{�װl(f��)늙C(j��)�Ĺ���ԭ��ʾ��D�� b�����(q��)�Ӱl(f��)늙C(j��)�ں㶨�����µĹ����^�̵Ĺ�W(xu��)�D�� c�����m(x��)�������¹��(q��)�Ӱl(f��)늙C(j��)�a(ch��n)�����_·늉��� d���l(f��)늙C(j��)�ڲ�ͬ��(qi��ng)������������®a(ch��n)�����_·늉��� e�����(q��)�Ӱl(f��)늙C(j��)�a(ch��n)�����_·늉���ֵ�c�⏊(qi��ng)�ȵ��P(gu��n)ϵ��
�����о��ɹ��� ��An Autonomous Soft Actuator with Light�\Driven Self�\Sustained Wavelike Oscillation for Phototactic Self�\Locomotion and Power Generation�����}������(n��i)����Փ�İl(f��)����Advanced Functional Materials��Adv. Funct. Mater. 2020, 30, 1908842���ϡ�
Փ��朽ӣ�https://doi.org/10.1002/adfm.201908842
- ̹���״�W(xu��)����ˬ��ʿ Adv. Mater.: �o�����l(f��)�� - �u�IҺ�������w������(q��)�������(q��)���� 2025-05-31
- ������F(tu��n)��c������ Adv. Mater.����������ˮ�(q��)�ӵķ����˹����� 2024-05-03
- ����w��/�����t�n�}�M Addit. Manuf.���ň��o���������������(q��)���� 2024-02-06
- �Ϲ�����f/������ՕԖ|����c�� AFM���܌�(sh��)�F(xi��n)�����׃���c����ʎ�\(y��n)�ӵ�MXene���Թ��(q��)���� 2023-10-24
�\���P(gu��n)ע�߷��ӿƼ�

- CPHI����չ��(sh��)�(y��n)�҃x���c�O(sh��)��...
- ���ܹ��A��朆���������22��...
- �������C(j��)����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �Ĵ���W(xu��)���A���ڈF(tu��n)ꠡ�Adv....
- �Ĵ���W(xu��)���������ڈF(tu��n)� Ang...
- �A��������W(xu��)���ָ���ڈF(tu��n)�...
- �칤����x/�R�w�R/���ƽ� S...
- �A���r(n��ng)�����/������...
- �Ʊ��ҽ���/�֘s�I(y��)���ڈF(tu��n)�...
- ��ӿƴ����|��/�������F(tu��n)�...
- �A������������� Angew: ...
- �Ĵ���W(xu��)������ AFM������ʯ...
- ��۳��д�W(xu��)�����n�}�M CEJ...
- �Ї��ƴ����d���n�}�M���邐...