����Ȼ���У��S������M�����缡�⡢Ƥ�w����(j��ng)��ľ�ġ��~�Ӻͻ����ɸ߶ȶ������е��Y(ji��)��(g��u)�M�ɣ��������ԣ�����(sh��)�F(xi��n)����������(d��o)����̖(h��o)���f���(q��)��(d��ng)���P(gu��n)�I�C(j��)�������磬�ɹ�����ԭ�w�Sʧˮ����ˮ�(q��)��(d��ng)���_���P(gu��n)���ڜضȡ���ȡ��������Ĵ̼��£�ֲ��ĸ����ԽY(ji��)��(g��u)�l(f��)����(d��ng)�B(t��i)��(g��u)��׃�����a(ch��n)���\(y��n)��(d��ng)�������������(n��i)��W(xu��)���_�l(f��)�˴��������Ե������(q��)��(d��ng)���������������������ģ�������w�������(q��)��(d��ng)-����һ�w���������²��ϣ���(g��u)���������Ҹ�֪���ܵ�ܛ�(q��)��(d��ng)���������д��о���ǰ���n�}����(du��)����ܛ�C(j��)���˵��l(f��)չ������Ҫ���x��

�D1 ����4D��ӡ�������Ԃ����(q��)��(d��ng)��
��ɽ��W(xu��)���ϿƌW(xu��)�c���̌W(xu��)Ժ�������ڈF(tu��n)�(du��)�������о������ܷ��������(q��)��(d��ng)����Mater Horiz 2023, 10.1039/D3MH00718A; Chem Eng J 2022, 450 138346; ACS Appl Mater Interfaces 2020, 12, 26476���͂�������Mater Horiz 2020, 7, 1872-1882; J Mater Chem B 2021, 9, 4423-4443; Langmuir 2022, 38, 11503-11513; J Polym Sci 2022, 60, 2605-2606������(b��o)���˸�֪-�(q��)��(d��ng)һ�w����̼�w�S��(f��)��ˮ���z������Adv Funct Mater 2023, 33, 2211189����
ԓ�F(tu��n)�(du��)�������M(j��n)չ��(b��o)����4D��ӡ���������Ե��Ը�֪ˮ���z�(q��)��(d��ng)�����D1�����Զ�̼�w�S/����ˮ���zǰ�(q��)Һ��īˮ�����ÔD��ʽ3D��ӡ�ļ�����ʹ��̼�w�S���L�s1 mm���ھۮ�������ϩ������PNIPAM��ˮ���z��(n��i)���������У��γɸ����ԽY(ji��)��(g��u)��̼�w�S��ȡ������ʹ����ˮ���z�ʜض�푑�(y��ng)�����ԣ���(d��ng)�ضȸ�׃�r(sh��)��ˮ���z��ƽ����̼�w�S����ʹ�ֱ��̼�w�S�������Û���տs�ʲ�ͬ�����������Û���տs�a(ch��n)����(n��i)��(y��ng)�����(q��)��(d��ng)׃�Ρ����_�{(di��o)�ش�ӡ·�������x̼�w�S��ȡ�����`����{(di��o)��(ji��)ˮ���z����׃·������������Ԫ������FEA�����Ԍ�(du��)׃���M(j��n)��ģ�M���O(sh��)Ӌ(j��)���D2������(g��u)������N����ܛ�(q��)��(d��ng)�����粶ω�ݺͺ���������(sh��)�F(xi��n)�˿ɿصĜ���׃���(q��)��(d��ng)���D2����

�D2 (a, b)ˮ���z�Ĵ�ӡ·����(c, d)ˮ���z�ڳ���ˮ��Һ�е�׃�κ�����Ԫģ�M����(bi��o)�ߣ�5 mm��(e)��ω�ݼ��²�ω��4D��ӡ��ˮ���z��(f)�������º���4D��ӡ��ˮ���z����(bi��o)�ߣ�5mm��
̼�w�S�ĸ�늌�(d��o)�ʺ�ȡ��Y(ji��)��(g��u)�x���(f��)��ˮ���z�^�õĂ�������������ϵ�y(t��ng)���о��˴�ӡ·����ˮ���z�D�����W(w��ng)��Y(ji��)��(g��u)�Ȳ�ͬ��������(du��)�������ܵ�Ӱ푣��о��l(f��)�F(xi��n)����(d��ng)̼�w�S���з����c���췽����ͬ�r(sh��)���˕r(sh��)���`��������ҙz�y������D3�������@�N�������N��������������P(gu��n)��(ji��)̎���܉�?q��)��r(sh��)�O(ji��n)�y�P(gu��n)��(ji��)���\(y��n)��(d��ng)���D4a, b)�������N���������܉�z�y��ˮ���fԒ��(d��o)�µ��������(d��ng)���D4c, d����
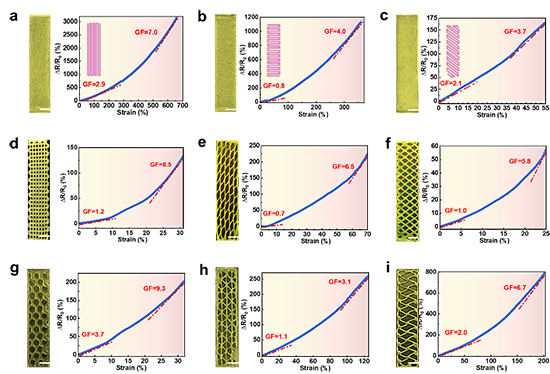
�D3 ��(a)ƽ�С�(b)��ֱ�����췽���(c)�c���췽���45o�Ǵ�ӡ��ˮ���z���`���ȡ�(d-i)��ͬ�W(w��ng)��Y(ji��)��(g��u)ˮ���z���`���ȡ���(bi��o)��:5mm��
��̼�w�S��(f��)��ˮ���z�Ă���������ҪԴ��̼�w�S�����z׃���^���е�����(du��)���ơ���(d��ng)�ضȸ�׃�r(sh��)��ˮ���z�l(f��)��׃�Σ�����(n��i)����̼�w�S��(hu��)�S֮�l(f��)������(du��)�Ƅ�(d��ng)����(d��o)��ˮ���z����׃�����@�͞��(q��)��(d��ng)-����һ�w���ṩ�˿��ܡ�ԓ�F(tu��n)�(du��)��ӡ�˻����κͺ����εĜ����(f��)��ˮ���z�(q��)��(d��ng)�����{(di��o)��(ji��)�ضȣ���ˮ���z�(q��)��(d��ng)�^���Ќ�(sh��)�r(sh��)�O(ji��n)�y���������׃������(d��ng)ˮ���z�(q��)��(d��ng)����25����50��֮�g����(f��)�(q��)��(d��ng)�^���У��z�y����(w��n)�������؏�(f��)�����׃�������߳ʬF(xi��n)��(qi��ng)�����P(gu��n)�ԣ��D4f, h���������ԓ�о���(sh��)�F(xi��n)�ˌ�(du��)ˮ���z�(q��)��(d��ng)�������O(ji��n)�y��ԓ�����ɞ�����ܛ�C(j��)���˵����Ҹ�֪�ͷ���ϵ�y(t��ng)�ṩһ���Ć��l(f��)��
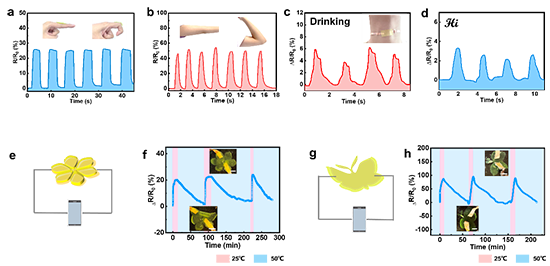
�D4 ˮ���z�������O(ji��n)�y(a)��ָ��(b)�ⲿ���\(y��n)��(d��ng)��̖(h��o)���Լ�����(c)��ˮ��(d)�f�������r(sh��)����̖(h��o)��(e)�����(q��)��(d��ng)�����Ը�֪ԭ��D��(f)��25����50���¿����(q��)��(d��ng)����̖(h��o)��(j)�����(q��)��(d��ng)�����Ը�֪ԭ��D��(h)��25����50�������]��r(sh��)����̖(h��o)����(bi��o)�ߣ�5 mm��
ԓ�о��_�l(f��)��һ�N���㡢�ɾ��̵ķ���������ˮ���z�(q��)��(d��ng)�����Ƃ䷽������ܛ�(q��)��(d��ng)���c�������ļ����_����һ�l��·����(du��)������ܛ�C(j��)���˵��_�l(f��)�͑�(y��ng)�þ�����Ҫ�����x��
ԓ�����ԡ�4D Printing of Biomimetic Anisotropic Self-sensing Hydrogel Actuators�����}�l(f��)����Chemical Engineering Journal��
ԓ�����õ��ˇ�����Ȼ�ƌW(xu��)����(51873224)��֧�֡�
Փ��朽ӣ�https://authors.elsevier.com/a/1hbs8_VWlWH2ml
�������ں���

�п�Ժ������Ӌ(j��)��������ɽ��W(xu��)������Ӌ(j��)�������㽭ʡ�ܳ�����������x�ߡ�Wiley������J Polym Sci����Ӣ���ʼҌW(xu��)��(hu��)�W(xu��)�g(sh��)�ڿ�J Mater Chem B��Materials Advances��ί����ʿ���I(y��)���Ї��ƌW(xu��)Ժ�L����(y��ng)�û��W(xu��)�о����߷��������c���W(xu��)�������c(di��n)��(sh��)�(y��n)�ҡ��Ⱥ��ڵ��R�ո߷����о��������������t(y��)�W(xu��)Ժ������ʡ���t(y��)Ժ���п�Ժ����������������2019�������ɽ��W(xu��)���ϿƌW(xu��)�c���̌W(xu��)Ժ���ν��ڣ�����(d��o)����Ҫ���¸������c���ܷ������Բ��ϡ����Ԃ����c�ɴ����O(sh��)�䡢ˮ���z�M�����̲��ϡ�����3D��ӡ�ȷ���Ļ��A(ch��)�о��c��(y��ng)�ü��g(sh��)�_�l(f��)��
���P(gu��n)�ɹ�����Adv Mater, Adv Funct Mater, Chem Eng J, Mater Horiz, Chem Mater, ACS Appl Mater Interfaces, Chem Commun, ACS Macro Lett, Macromolecules�ȸ�ˮƽ�ڿ��l(f��)��Փ��140��ƪ������Ӣ�Č���1����ȫ��Փ����Ӌ(j��)������8400��Σ�Hָ��(sh��)50���ڙ�(qu��n)�����l(f��)������1�(xi��ng)���Ї��l(f��)������20���(xi��ng)���@Ӣ���ʼһ��W(xu��)��(hu��)2020��Materials Horizons Outstanding Paper-Runners-up Award�Ȫ�(ji��ng)�(xi��ng)��
�F(tu��n)�(du��)������Ƹ�߷��ӡ�������ϡ�ˮ���z�����Ԃ��С������(q��)��(d��ng)�ȷ���ĸ����ڡ��������ڡ��о��������ڡ��о������ڡ����в�ʿ��ȡ��gӭ����W(xu��)�ӈ�(b��o)�����F(tu��n)�(du��)�Tʿ����ʿ�о������n�}�M��퓣�
https://mse.sysu.edu.cn/teacher/98
http://m.jrdgc.com/ss/fujun/index.html
https://scholar.google.com/citations?hl=zh-CN&user=_G1QhgEAAAAJ&view_op=list_works&sortby=pubdate
- �����i���ڡ���?ji��n)�䅸����?����γ������ Adv. Sci.����(d��ng)�B(t��i)�I����(qi��ng)�����������w��4D��ӡ - ���������������t(y��)�W(xu��)�C�� 2025-06-10
- �A�|�����R�J���ڈF(tu��n)�(du��) Nat. Commun.����̻���4D��ӡ�^���Ҝ����ҕ�� 2025-05-08
- �ۿƴV�ݣ������n�}�M�\�в�ʿ�� - �߷��ӡ����W(xu��)�����ϡ��C(j��)е��������2025���^��2026�괺����W(xu��)�� 2025-03-08
- ��۳��д�W(xu��)�����n�}�M CEJ��ֲ��l(f��)�ݶȿך����z - ��(sh��)�F(xi��n)�������l(f��)�еĿ���ˮ��ݔ�c�����l(f��)�� 2025-07-10
- �B�T��W(xu��)�܌W(xu��)������ Macromolecules���ߏ�(qi��ng)��𤳬���w��(d��ng)�B(t��i)�߷��ӾW(w��ng)�j(lu��)�ķ����O(sh��)Ӌ(j��)����߶���׃��Փģ�M���� 2025-07-03
- ̫ԭ������W(xu��)�����ֽ��� Adv. Sci.: ������z�x�ܷ�����ģ�ԱO(ji��n)��ָ�����w 2025-07-02
- ��ӿƴ��ϲ���ڈF(tu��n)�(du��)/��h�����_����(qi��ng)���ڈF(tu��n)�(du��) Adv. Mater.: �������L�^�̆�ʾ�ĸ����������Lˮ���z 2025-03-19
�\���P(gu��n)ע�߷��ӿƼ�

- CPHI����չ��(sh��)�(y��n)�҃x���c�O(sh��)��...
- ���ܹ��A��朆���������22��...
- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј���300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �Ĵ���W(xu��)���A���ڈF(tu��n)�(du��)��Adv....
- �Ĵ���W(xu��)���������ڈF(tu��n)�(du��) Ang...
- �A��������W(xu��)���ָ���ڈF(tu��n)�(du��)...
- �칤����x/�R�w�R/���ƽ� S...
- �A���r(n��ng)�����/������...
- �Ʊ��ҽ���/�֘s�I(y��)���ڈF(tu��n)�(du��)...
- ��ӿƴ����|��/�������F(tu��n)�(du��)...
- �A������������� Angew: ...
- �Ĵ���W(xu��)������ AFM������ʯ...
- ��۳��д�W(xu��)�����n�}�M CEJ...
- �Ї��ƴ����d���n�}�M���邐...