����������������������Small������׃���x���l(f��)�Ķ�Һ�͙C����
2023-07-03 ��Դ���߷��ӿƼ�
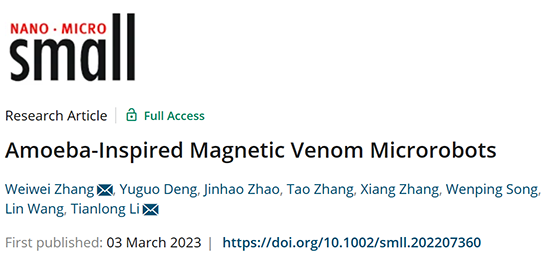
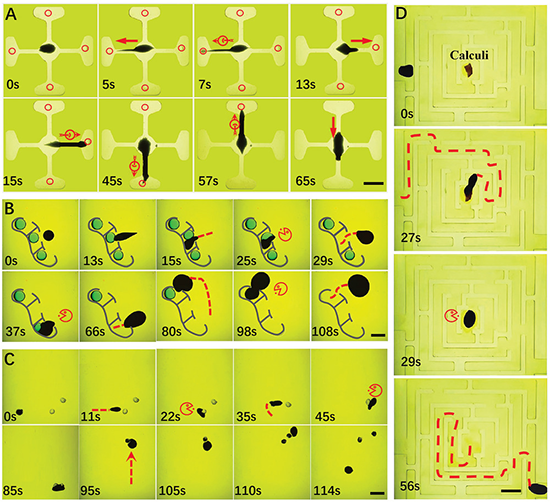
����Ȼ��μ�(x��)�����(y��ng)����(f��)�s�h(hu��n)���������΄�(w��)�ݻ���һ�N�ɹ����M���������㡣׃���x��һ�N�μ�(x��)��ԭ�����ͨ�^����ԭ���|(zh��)�Ķ������ӣ����������ⷽ��a(ch��n)�����㣬�Ԉ�(zh��)�Эh(hu��n)����֪���\�ӡ���ʳ����й��������ӡ�Ȼ������(chu��ng)�����Ђ�����͙C����ϵ�y(t��ng)���ԫ@ȡ׃���x�ĭh(hu��n)���m��(y��ng)���΄�(w��)���I(y��)�������Ծ��кܴ������(zh��n)��
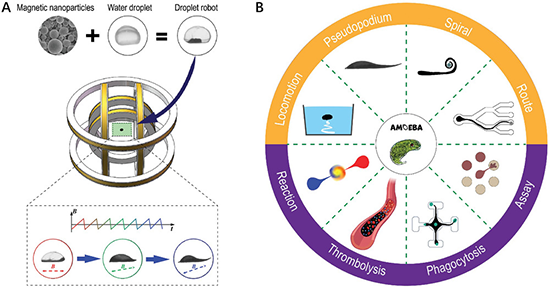
�D 1 �C���˵ľ��̲��Ժ͑�(y��ng)��
�D 2 ���������
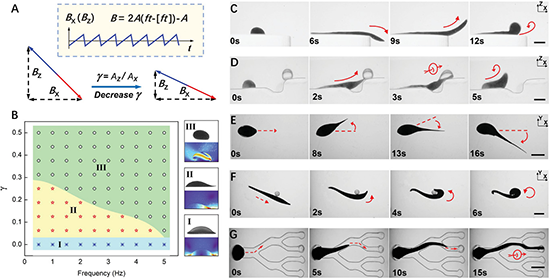
�D 3 �C���˵��\������
�D 4 �C���˵���������
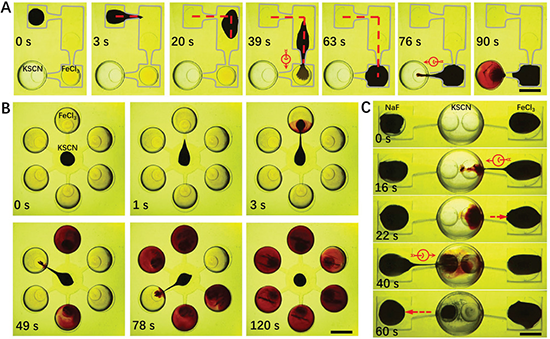
�D 5 �C���˵ļ��������ͻ��W(xu��)��(y��ng)��
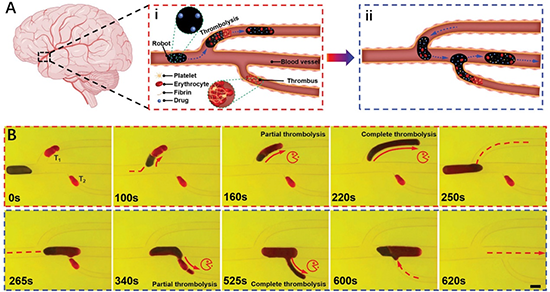
�D 6 ʹ�ö�Һ�C�����M��ˎ����˨
ԭ��朽ӣ�https://onlinelibrary.wiley.com/doi/10.1002/smll.202207360
���(qu��n)�c��؟(z��)�����Ї��ۺ���W(w��ng)ԭ��(chu��ng)���¡������ý�w�����D(zhu��n)�d��Ո(li��n)ϵ�]�䣺info@polymer.cn����Ոע����̎��
��؟(z��)�ξ���xu��
���P(gu��n)��
- �B�T��W(xu��)�܌W(xu��)������ Macromolecules���ߏ���𤳬���w�ӑB(t��i)�߷��ӾW(w��ng)�j(lu��)�ķ����O(sh��)Ӌ����߶���׃��Փģ�M���� 2025-07-03
- ̫ԭ������W(xu��)�����ֽ��� Adv. Sci.: ������z�x�ܷ�����ģ�ԱO(ji��n)��ָ�����w 2025-07-02
- ���ϴ�W(xu��)������/����Ⱥ/���� Adv. Mater.����������ʿ�{(l��n)�{��ܷ��������ݶȿ���Ϳ�� 2025-07-01
- ���������ƾ��_(d��)�n�}�M��ACS AMI��: �����B(t��i)���(q��)���͙C���� 2024-01-25
- �����ď���/���������ڣ���|�|�F� Sci. Adv.������đ�܃�(n��i)����(x��)���f�͵�ģ�K���͙C���� 2023-12-19
- ˹̹���w�ǿɽ��ڡ�Nat. Commun.�������w��(n��i)���w�ٸ��� - �o���ɗ���ˎ�C���� 2022-06-17
�\���P(gu��n)ע�߷��ӿƼ�

����>>�����YӍ
- ���ܹ��A��朆���������22��...
- �������C����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
����>>�ƽ���
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h(yu��n)���ڈF� AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈFꠡ�Ac...
- ���W(xu��)����������T PRL����...
- �㽭��W(xu��)�Ǿ�܊���������F�...
- �����ִ�Źٱ����ڡ�������...
- �п�Ժ�{����Դ�����ܡ�����...
- �V�t(y��)��Ժ���١��V���T��ܰ N...
- �������i�w/���������...
- ����炐�ȁ���W(xu��)���h����...